Описание примера "Система управления автоматической трансмиссией" подготовлено при участии студента СамГТУ Тяна П.В.
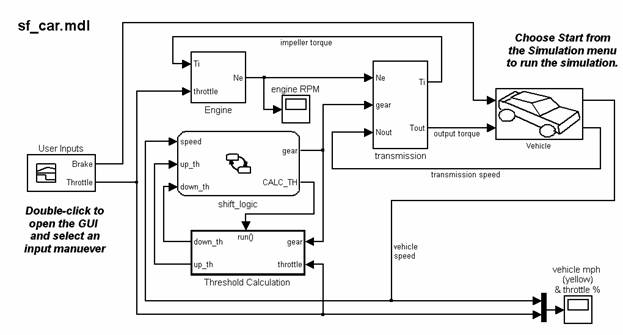
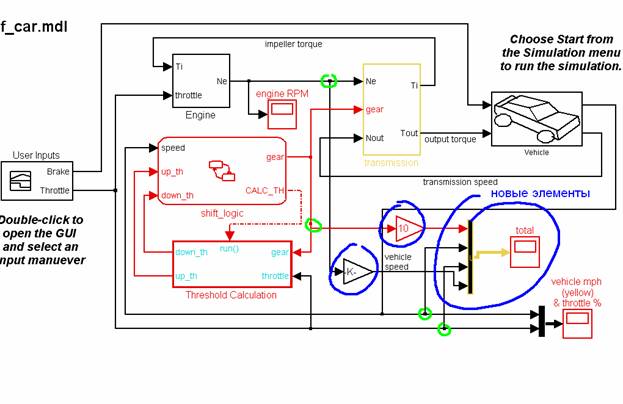
Данная модель имитирует работу автоматической системы переключения передач для легкового автомобиля. Модель является демонстрационным примером использования пакетов Simulink и Stateflow, является гибридной системой с вложенными подсистемами. При загрузки модели появляется основная схема sf_car, имеющая следующий вид:
Рис.1. Общая модель автомобиля.
На данной иллюстрации вы можете увидеть все основные подсистемы легкового автомобиля, которые были смоделированы. Все обозначенные здесь элементы в свою очередь являются составными подсистемами с внутренней структурой, посмотреть которую можно путем двойного щелчка на соответствующем графическом элементе, представляющую ту или иную подсистему.
Это вы можете сделать и с использованием браузера модели.
При нажатии на соответствующий пункт из раскрывающегося древообразного меню в правой части окна появляются соответствующие подсистемы. Следует отметить, что некоторые подсистемы также являются композитными и содержат в себе вложенные подсистемы. В данном случае такой системой является трансмиссия.
Пункты меню имеют следующие значения:
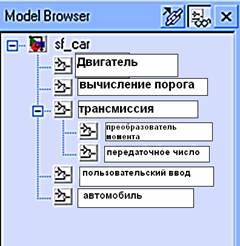

Рис.2.1,2.2 Браузер модели.
Элементы общей модели обозначают следующие подсистемы:
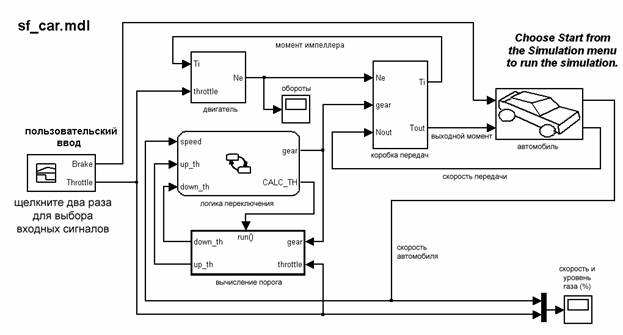
Рис. 3. Общая модель автомобиля (перевод)
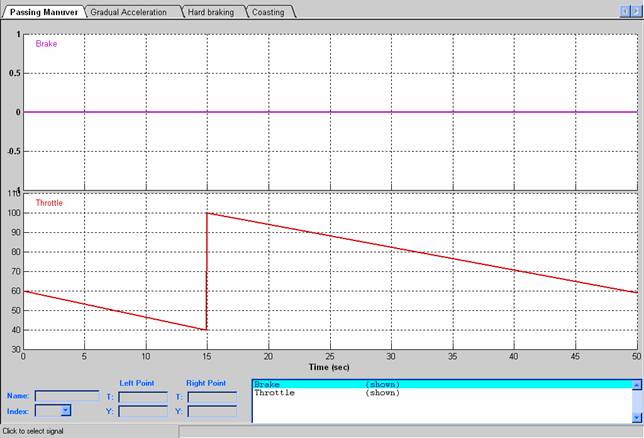
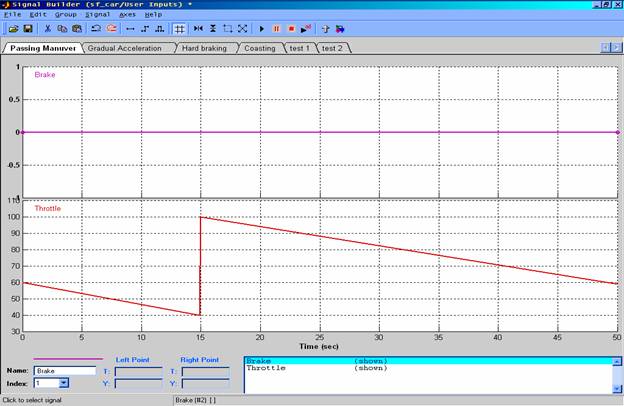
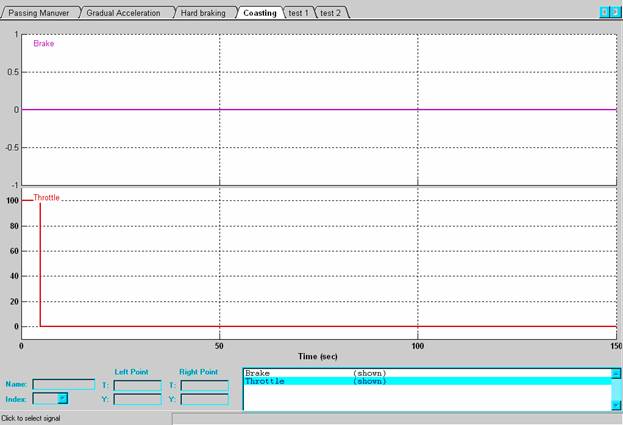
Модуль для пользовательского ввода сигналов представляет возможность пользователю графически задавать временные диаграммы выходного сигнала для этого блока:
Рис. 4. Построитель сигналов
По горизонтальной оси отложено время в секундах, а по вертикальной оси задаются уровни сигналов. На вкладках данного окна содержатся заранее предустановленные формы сигналов для разных экспериментов и режимов работы виртуального автомобиля.
Блок "Построитель Сигналов" выдает два сигнала: Brake и Throttle, которые соответствуют степени нажатия педали тормоза и газа (в процентах). На показанной закладке режима "маневрирование" педаль тормоза не нажимается, а уровень нажатия газа линейно меняется с первой по пятнадцатую секунды с 60-ти до 40-ка процентов, а затем резко возрастает до ста. Остальные закладки моделируют постепенный разгон, ручное торможение и движение по инерции после разгона. Мы остановимся на первом примере, демонстрирующем маневрирование.
Сигнал уровня газа с построителя сигналов передается на модуль двигателя, который имеет следующую модель:
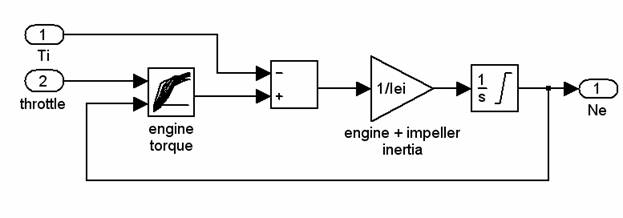
Рис. 5. Двигатель
Данная модель учитывает как степень нажатия педали газа (отвечающая за количество сгораемого топлива и соответственно, за силу вращения), так и инерционность двигателя, также, как и текущего состояния коробки передач. На вход коробки передач подаются значения уровня нажатия педали газа и момент импеллера. На выходе мы имеем число оборотов.
Значение оборотов двигателя передается на коробку передач, которая контролируется автоматикой, и выставляет требуемое передаточное число. Далее показана модель коробки передач:
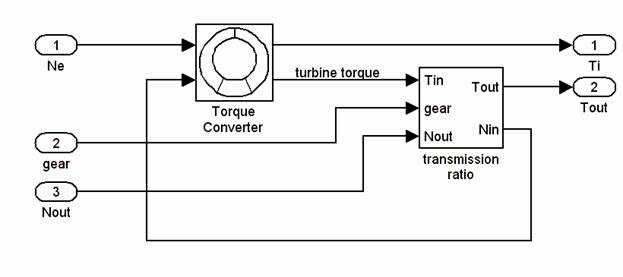
Рис. 6. Коробка передач.
Используя значения скорости автомобиля, необходимого значения передаточного числа и текущего реального значения оборотов, модель коробки передач вычисляет выходной момент, подаваемый на колеса и момент импеллера. Отношение передач и преобразователь момента являются моделями механических объектов автомобиля.
Преобразователь момента и отношение передач являются подсистемами, и имеют следующую структуру:
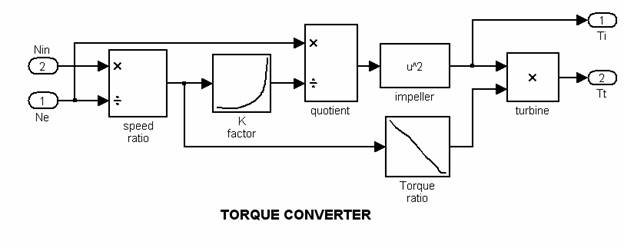
Рис.7. Преобразователь момента.
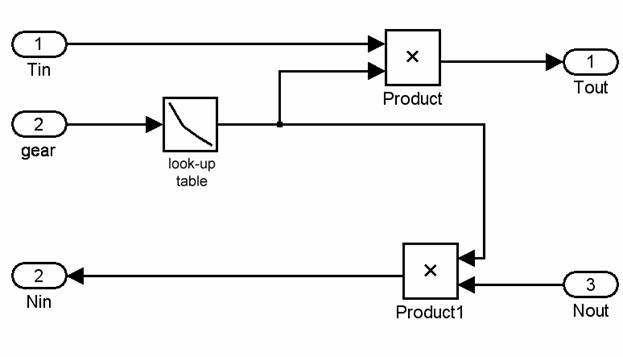
Рис. 8. Отношение передач.
На следующий элемент "автомобиль" подается значения выходного момента с коробки передач и момент, передаваемый тормозной системой. Внешняя механическая модель автомобиля представлена так:
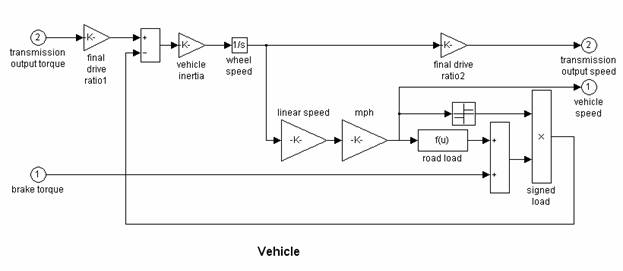
Рис. 9. Автомобиль
Эта модель моделирует езду автомашины, которая характеризуется нагрузками и моментами сопротивления, в результате чего высчитываются выходное значение числа оборотов для коробки передач, а также скорость.
Значение скорости и уровня газа выводятся на построение. Для данного эксперимента (маневрирование) с определенными временными диаграммами управления график скорости выглядит следующим образом:
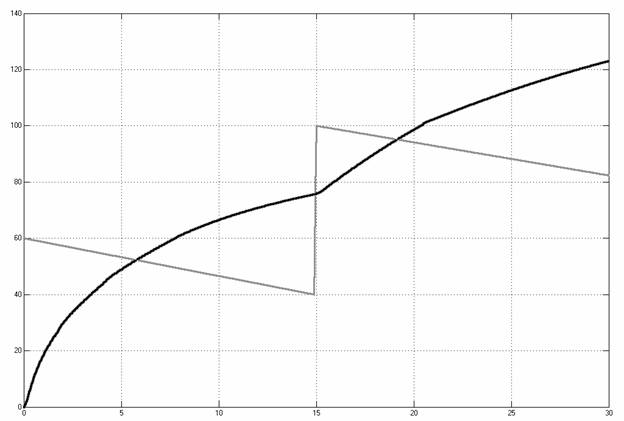
Рис.10. График скорости.
Черной утолщенной линией показан рост показателя скорости в зависимости от времени. (напомним, что другой график представляет состояние педали газа).
Теперь рассмотрим работу контролирующих механизмов, в частности, собственно
систему автоматического переключения скоростей. Следующая иллюстрация изображает модель вычислителя порогов переключения.
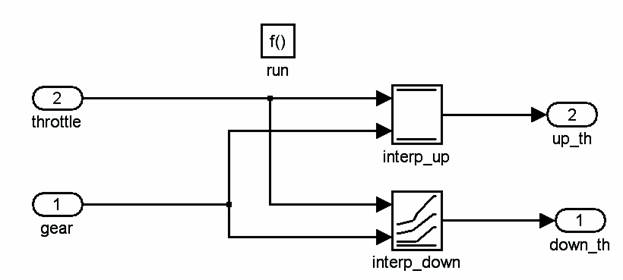
Рис. 11. Вычислитель порогов переключения.
На входе данной модели: текущее передаточное число и уровень газа. Эти сигналы одновременно поступают в блоки interp_up и interp_down, которые, используя механизм 2D look-up table (где по таблицам для определенных диапазонов входов вычисляется выход) вычисляют пороги переключения скорости вверх и вниз.
Эта подсистема запускается другим модулем - Shift_logic, выполняющим роль логического контроллера, на выход которого выставляется необходимое значение положения переключателя скоростей. Данная модель реализована средствами Stateflow:
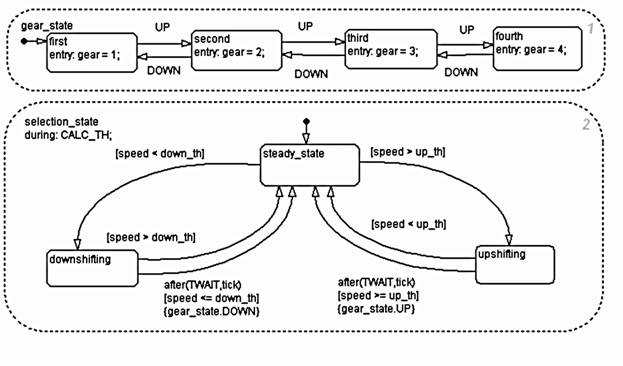
Рис. 12. Логический контроллер переключений.
Здесь имеется два состояния, одно из которых характеризует положение переключателя скоростей в статическом режиме работы (gear_state), а другое отвечает за механизм переключения и имитирует реальный автоматический переключатель скоростей, базируясь на определенной логике переключений.
На вход этой модели подаются текущее значение скорости, порог переключения вниз и вверх. В статическом режиме коробка передач находится в одном из четырех состояний (скорости с первой по четвертую, без реализации нейтральной и заднего хода), которое задается переменной gear, которая, в свою очередь, выставляется в одном из состояний gear_state.
При достижении скоростью определенного порога, например, если текущее значение скорости больше необходимого порога переключения вверх, то в selection_state (состояние выбора скорости) происходит следующее: из состояния steady_state система переходит по линии [speed>up_th] в состояние upshifting (переключение вверх). Если при этом значение текущей скорости продолжает быть выше порога переключения вверх с текущей скорости, то после имитации задержки (реального объекта) дается команда для состояния gear_state перейти по линии UP, то есть, увеличить передаточное число, выставляя большее значение gear. Если же в состоянии upshifting скорость неожиданно упала ниже порога, то переключения не происходит, и система переходит в предыдущее состояние.
Для каждого значения gear, в зависимости от степени нажатия педали газа модуль вычисления порогов выдаст свои значения пороговых скоростей переключения.
Используя эту модель, Вы можете проследить за графиками скорости автомобиля и оборотов двигателя для разных режимов, а также попробовать вручную задать временные диаграммы управления.
График оборотов двигателя для режима "маневрирование" имеет следующий вид:
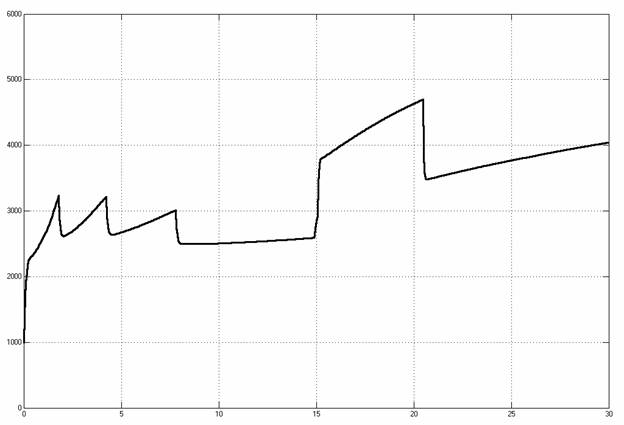
Рис. 13. Временной график значений оборотов двигателя.
Теперь проведем серию экспериментов с моделями, имея цель увидеть временные диаграммы всех контролируемых параметров двигателя. Для этого в общую схему введем новый элемент "scope", на котором будет мультиплексироваться четыре сигнала: положение коробки передач, скорость, обороты, и степень нажатия педали газа. Заметим, что из-за различий диапазонов измеряемых величин вводятся корректирующие коэффициенты, которые представляют значение положения коробки передач увеличен в 10 раз, и таким образом, значение 10 указывает на первую скорость, 20 - на вторую и т.д. Значение оборотов двигателя уменьшено в 100 раз, и поэтому значение оборотов следует выявлять, умножая на сто значение на графике. (т.е. на график показывает значение оборотов в сотнях).
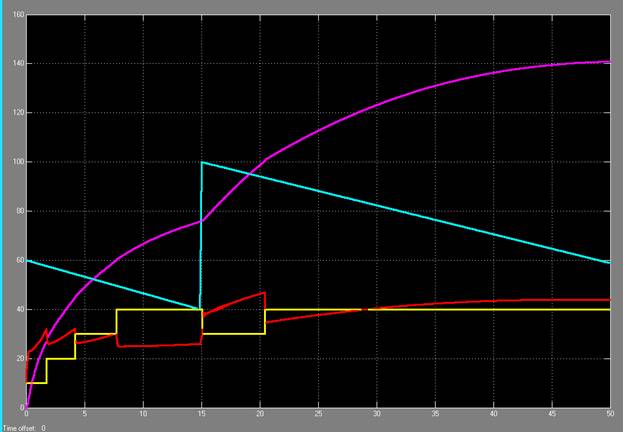
Рассмотрим графики динамики автомобиля и попытаемся их проанализировать.
При этом модифицированная схема имеет следующий вид:
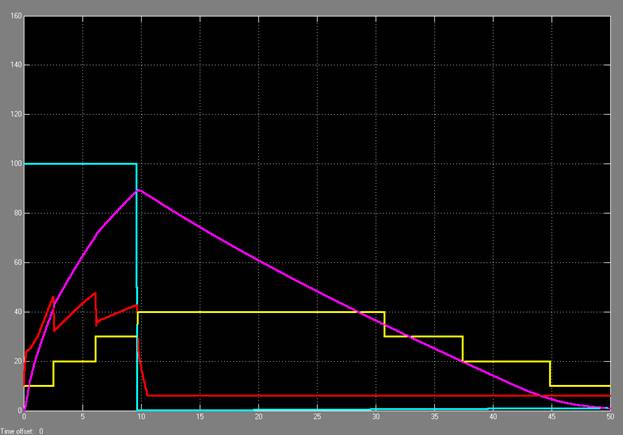
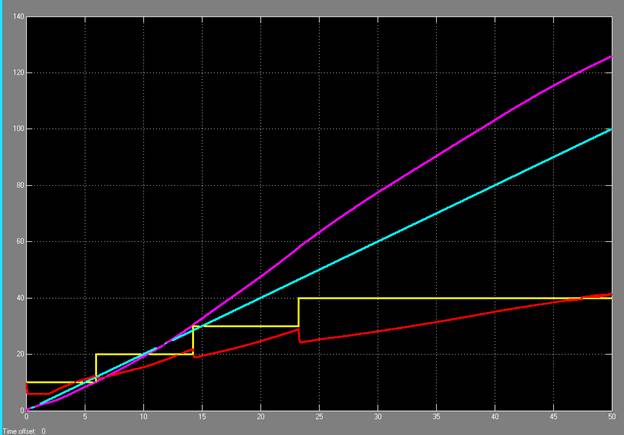
В окне построителя графиков цвета соответствуют следующим величинам:
голубой - уровень газа
фиолетовый - скорость
красный - число оборотов
желтый - ступень коробки передач
Опыт 1. Маневрирование.
Сигналы управления:
Динамика автомобиля:
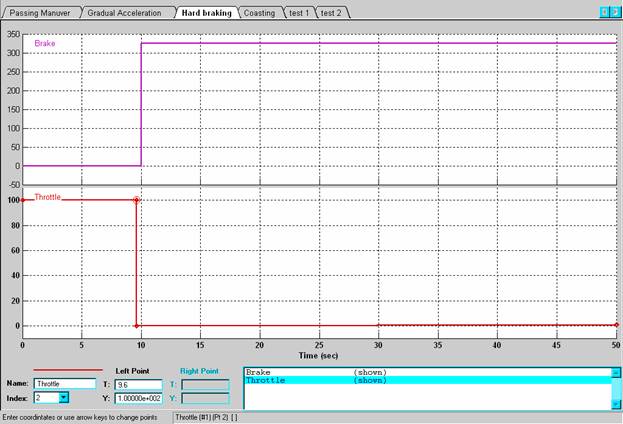
Опыт 2. Резкое торможение.
Управление:
Динамика:
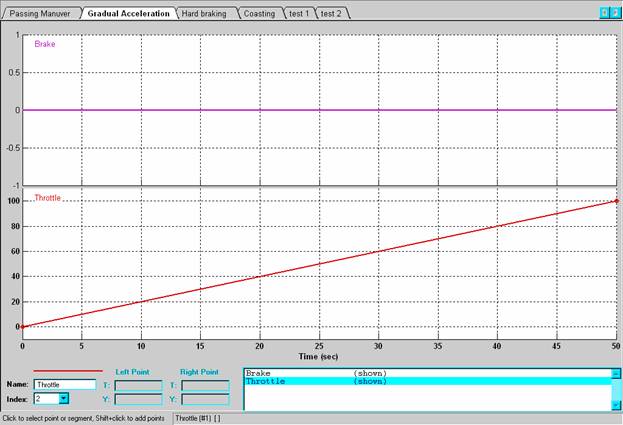
Опыт 3. Плавный разгон.
Управление:
Динамика:
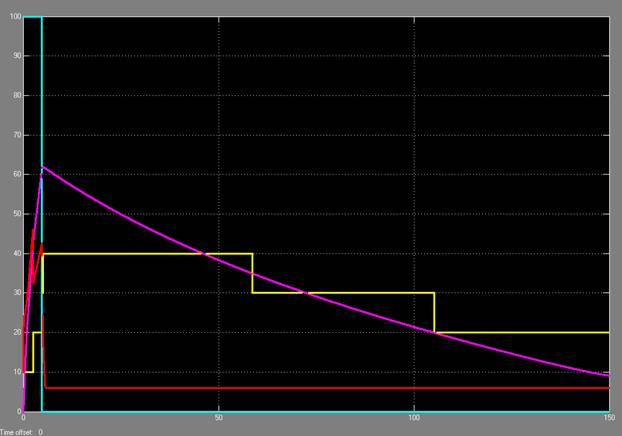
Опыт 4. Движение по инерции.
Управление:
Динамика:
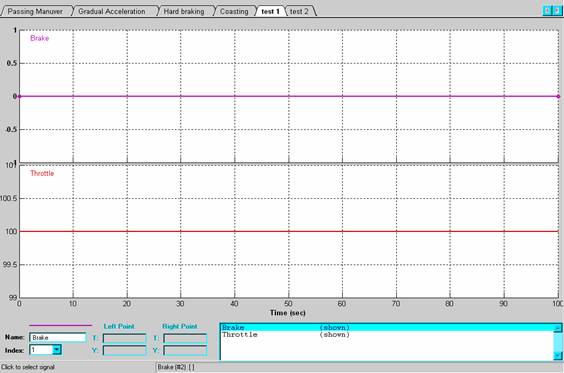
Опыт 5. Определение динамических характеристик автомобиля
В этом опыте мы попытаемся определить максимальную скорость автомобиля, время разгона до 100 миль/ч, а также пороговые скорости переключения коробки передач. Для этого нужно сымитировать нажатие педали газа до достижения максимально скорости:
В результате получаем следующие графики:
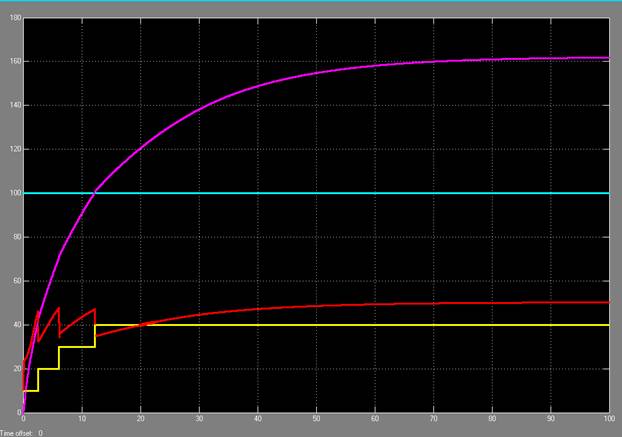
Для определения максимальной скорости можно воспользоваться возможностью просмотра отдельных областей графика, предоставленой Matlab:
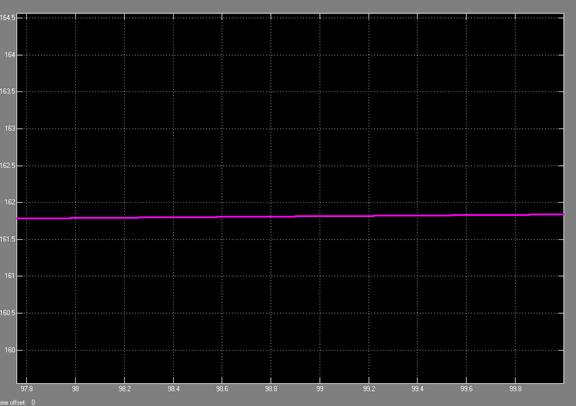
Значение максимальной скорости находится между отметками 161.5 и 162.
Для определения времени разгона автомобиля до 100 миль/ч воспользуемся режимом увеличительного стекла для области, где скорость пересекает отметку 100:
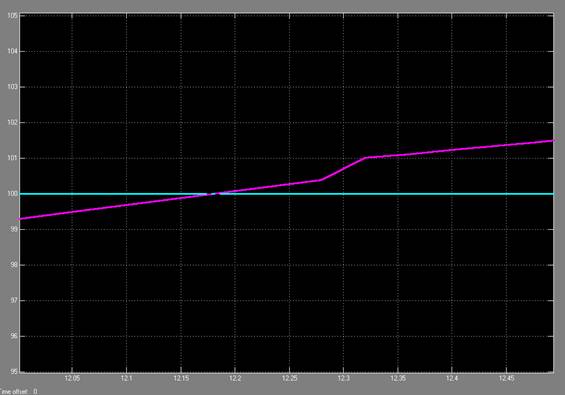
Из этого графика можно заключить, что машина разгоняется до 100 миль/ч за 12.17 секунд.
Если перевести скорости в км/ч, и выяснить время разгона до 100 км/ч (около 62.5 миль/ч), то оно будет составлять около 5-ти секунд. Это очень малое время разгона, из чего можно заключить, что машина спортивная. (Класса А, куда входят такие машины, как Lamborgini Diablo или Ferrary F50)
А максимальна скорость составит около 260 км/ч.
Впрочем, все найденные выше значения графическим способом можно найти более точно методами Matlab.
Пользуясь увеличительным стеклом, можно также определить, что при разгоне, вторая скорость включается при достижении скорости чуть более 40 миль/ч, третья - при скорости более 70 миль/ч, а четвертая - на скоростях более 100 миль/ч.
Здесь можно бы было порекомендовать 6-ти ступенчатую коробку передач.
|
|
