Томография ядерного магнитного резонанса или Магнитно-резонансная томография (МРТ) - это метод отображения, используемый, главным образом, в медицинских установках, для получения высококачественных изображений органов человеческого тела. МРТ основана на принципах ядерно-магнитного резонанса (ЯМР) поэтому и получила такое название. Метод был назван магнитно-резонансной томографией, а не ядерно-магнитной резонансной томографией (ЯМРТ) из-за негативных ассоциаций со словом "ядерный" в конце 1970-х годов. Во введении мы кратко говорили об истории появления этого метода медицинской диагностики. Напомним, что в 1946 году Блох и Парселл независимо открыли явление магнитного резонанса и в 1952 году оба были удостоены Нобелевской премии. В период с 1950 и до настоящего времени, ЯМР развивался и использовался для химического и физического молекулярного анализа на этом пути были получены чрезвычайно интересные результаты, которые широко использовались при исследовании сложных молекулярных соединений. В 1973 году Лаутербур продемонстрировал отображение с использованием ЯМР и метода обратного проецирования, используемого в рентгеновской КТ. В 1975 году Эрнст предложил магнитно-резонансную томографию с использованием фазового и частотного кодирования, метод, который используется в МРТ в настоящее время. Эдельштейн с сотрудниками, используя этот метод, продемонстрировали отображение человеческого тела в 1980 году. Для получения одного изображения требовалось приблизительно 5 минут. К 1986 году время отображения было снижено до 5 секунд без какой-либо значимой потери качества. В том же году был создан ЯМР-микроскоп, который позволял добиваться разрешения 10 м на образцах размером в
Магнитно-резонансная томография основывается на поглощении и испускании энергии в радиочастотном диапазоне электромагнитного спектра. Из спектра затухания человеческого тела понятно, почему используются рентгеновские лучи, но почему же потребовалось так много времени для создания методики отображения при помощью радиоволн, особенно, если принять во внимание такую озабоченность здоровьем, связанную с ионизирующей радиацией, такой как рентгеновские лучи? Многим ученым говорили, что невозможно увидеть объект, меньше, чем длина волны излучения, используемого для получения изображения. МРТ преодолевает это ограничение за счет получения изображений, основанных на пространственных вариациях фазы и частоты радиочастотной энергии, поглощенной и испущенной отображаемым объектом.
В основном, человеческое тело состоит из жира и воды. Жир и вода состоят из множества атомов водорода, что делает человеческое тело состоящим на 63% из атомов водорода. Ядро атома водорода испускает ЯМР-сигнал. По этим причинам магнитно-резонансное изображение преимущественно отображает ЯМР-сигнал от ядер водорода. Если увеличить один из атомов водорода, то за электронным облаком мы увидим ядро содержащее единственный протон. Протон обладает свойством, называемое спином.
Спин - это одно из основных свойств в природе, таких как электрический заряд или масса. Спин кратен 1/2 и может быть положительным или отрицательным (+ или -). Протоны, электроны и нейтроны обладают спином. Каждый непарный электрон имеет спин равный 1/2. Каждый непарный протон имеет спин равный 1/2. Каждый непарный нейтрон имеет спин равный 1/2. Атом дейтерия ( 2H ), с одним непарным электроном, одним непарным протоном и одним непарным нейтроном имеет общий электронный спин равный 1/2 и общий ядерный спин равный 1.
Частицы с противоположным знаком спина могут образовывать пары, которые взаимно элиминируют заметные проявления спина. Примером является гелий. В ядерном магнитном резонансе значение имеют непарные ядерные спины.
Частица со спином, помещенная в магнитное поле, напряженностью В, может поглощать фотон, с частотой n, которая зависит от ее гиромагнитного соотношения g.
![]() =
= ![]() B (6.1)
B (6.1)
Для водорода, ![]() = 42.58 MГц / Tл.
= 42.58 MГц / Tл.
ЯМР может быть представлен только на тех изотопах, чья встречаемость в природе достаточна велика для обнаружения. Некоторые из этих ядер, представляющие интерес для МРТ, представлены на следующей таблице 6.1
Таблица 6.1
| Ядра |
Непарные протоны |
Непарные нейтроны |
Суммарный спин |
|
| 1H |
1 |
0 |
1/2 |
42.58 |
| 2H |
1 |
1 |
1 |
6.54 |
| 31P |
0 |
1 |
1/2 |
17.25 |
| 23Na |
0 |
1 |
3/2 |
11.27 |
| 14N |
1 |
1 |
1 |
3.08 |
| |
0 |
1 |
1/2 |
10.71 |
| 19F |
0 |
1 |
1/2 |
40.08 |
Для понимания того, как частицы со спином ведут себя в магнитном поле, представим протон. Представим, что спин этого протона, является вектором магнитного момента, который заставляет протон вести себя как очень маленький магнит с северным и южным полюсами.
Когда протон помещен во внешнее магнитное поле, вектор спина располагается как магнит, по отношению ко внешнему полю. Состояние, когда полюса расположены N-S-N-S, является низкоэнергетическим (рисунок 6.1)
![]()
![]()
![]()
Рисунок 6.1
, а N-N-S-S – высокоэнергетическим (рисунок 6.2).
![]()
![]()
![]()
Рисунок 6.2
Частица может подвергаться переходу между двумя энергетическими состояниями, поглощая фотон. Частица на нижнем энергетическом уровне поглощает фотон и оказывается на верхнем энергетическом уровне. Энергия данного фотона должна точно соответствовать разнице между этими двумя состояниями. Энергия протона, Е, связана с его частотой, ![]() , через постоянную Планка (h = 6.626x10-34 Дж с).
, через постоянную Планка (h = 6.626x10-34 Дж с).
E = h ![]() (6.2)
(6.2)
В ЯМР величина ![]() называется резонансной или частотой Лармора.
называется резонансной или частотой Лармора.
Мы уже видели, что ![]() =
= ![]() B и E = h
B и E = h ![]() , поэтому, для того, чтобы вызвать переход между двумя спиновыми состояниями, фотон должен обладать энергией
, поэтому, для того, чтобы вызвать переход между двумя спиновыми состояниями, фотон должен обладать энергией
E = h ![]() B (6.3)
B (6.3)
Когда энергия фотона соответствует разнице между двумя состояниями спина, происходит поглощение энергии. В ЯМР экспериментах частота фотона соответствует радиочастотному (РЧ) диапазону. Для ядер водорода в ЯМР-спектроскопии, ![]() находится в пределах 60 и 800 MГц. В клинической МРТ, для отображения водорода,
находится в пределах 60 и 800 MГц. В клинической МРТ, для отображения водорода, ![]() как правило находится между 15 и 80 MГц.
как правило находится между 15 и 80 MГц.
Самым простым ЯМР исследованием является стационарный МР (или свип-МР) метод. Существуют два пути проведения этого эксперимента. При первом, непрерывное РЧ облучение с постоянной частотой, исследует энергетические уровни, в то время как магнитное поле варьируется. Энергия этой частоты представлена вертикальной линей на диаграмме энергетических уровней, рисунок 6.2 и на рисунке 6.3 представлен график этой энергии.

Рисунок 6.2 - Диаграмма энергетических уровней

Рисунок 6.3 – График абсолютной энергии
Стационарный метод может также быть проведен с постоянным магнитным полем, когда варьируется частота. Величина постоянного магнитного поля представлена положением вертикальной линией на диаграмме энергетических уровней, рисунок 6.4, и на рисунке 6.5.

Рисунок 6.4 - Диаграмма энергетических уровней

Рисунок 6.5 – График абсолютной энергии
Когда несколько одинаковых атомов помещены в магнитное поле каждый принимает одну из двух возможных ориентаций. При комнатной температуре количество спинов на нижнем энергетическом уровне, N+, незначительно превосходит количество на верхнем уровне N-. Статистика Больцмана показывает, что
N-/N+ = e-E/kT.
где,
Е - разность энергии между спиновыми состояниями,
k - постоянная Больцмана (1.3805x10-23 Дж/К) и
Т - абсолютная температура.
При уменьшении температуры уменьшается отношение N- /N+. При увеличении температуры отношение увеличивается.
Сигнал в ЯМР-спектроскопии получается из разности между поглощенной энергией спинами, которые подверглись переходу с более низко энергетического уровня на более высокий и энергией, испускаемой спинами, которые одновременно перешли с более высокого энергетического уровня на более низкий. Сигнал пропорционален разности в заселенностях уровней. ЯМР является достаточно чувствительной спектроскопией, поскольку может различать такие небольшие различия в заселенностях. Резонанс или энергетический обмен между спинами и спектрометром на определенной частоте придают ЯМР такую чувствительность.
Весьма обременительным является описание ЯМР на микроскопическом уровне. Макроскопическая картина более удобна. Первым шагом к созданию макроскопической картины определим спиновый пакет. Спиновый пакет - это группа спинов испытывающих на себе одну и ту же силу магнитного поля. В примере на рисунке 6.6, спины внутри каждой секции решетки представляют собой спиновый пакет.

Рисунок 6.6
В любой момент времени магнитное поле, соответствующее спинам в каждом спиновом пакете может быть представлено вектором намагниченности (рисунок 6.7).

Рисунок 6.7
Величина каждого вектора пропорциональна (N+ - N-).
Сумма всех векторов намагниченности всех спиновых пакетов является суммарной (общей) намагниченностью (рисунок 6.8). Для описания импульсного ЯМР необходимо пользоваться термином суммарной намагниченности.

Рисунок 6.8
Для преобразования в общепринятую ЯМР систему координат, внешнее магнитное поле и вектор общей намагниченности направляются вдоль оси Z (рисунок 6.9).
![]()

Рисунок 6.9
В состоянии равновесия, вектор суммарной намагниченности параллелен направлению примененного магнитного поля Bo и называется равновесной намагниченностью Mo. В этом состоянии, Z-составляющая намагниченности MZ равна Mo. Еще MZ называется продольной намагниченностью. В данном случае, представленном на рисунке 6.10, поперечной (MX или MY) намагниченности нет.

Рисунок 6.10
Суммарную намагниченность можно изменить, подвергнув ядерный спин воздействию энергией частоты равной разности энергии между спиновыми состояниями. Если в систему поступило достаточно энергии, можно насытить спиновую систему и сделать MZ=0 (рисунок 6.11).

Рисунок 6.11
Временная константа, описывающая как MZ и представленная на рисунке 6.12, возвращается к равновесному значению, называется временем спин-решеточной релаксации (T1). Это явление описывается уравнением, являющимся функцией от времени t, которое после преобразования имеет вид:
MZ= Mo ( 1 - e-t/T1 ) (6.3)

Рисунок 6.12
Поэтому T1 определяется как время, необходимое для того, чтобы изменить Z-составляющую намагниченности коэффициентом е.
Если суммарная намагниченность стала направлена вдоль отрицательного направления оси Z, она постепенно вернется в состояние своего равновесия вдоль положительного направления оси Z, со скоростью, определяемой T1. Это явление описывается уравнением, являющимся функцией от времени t, которое после преобразования имеет вид:
Mz = Mo ( 1 - 2e-t/T1 ) (6.4)
Время спин-решеточной релаксации (T1) - это время необходимое для уменьшения разности между продольной намагниченностью (MZ) и ее равновесным значением с коэффициентом е.
Если суммарная намагниченность расположена в плоскости XY, она будет вращаться вокруг оси Z с частотой, равной частоте фотона, который вызывает переход между двумя энергетическими уровнями спина. Эта частота называется частотой Лармора.
В дополнение к вращению вектор суммарной намагниченности начинает сдвигаться по фазе (расфазировываться) из-за того, что каждый спиновый пакет испытывает магнитное поле, немного отличающееся от магнитного поля, испытываемого другими пакетами, и вращается со своей собственной частотой Лармора. Чем больше проходит времени, тем больше фазовая разница. В данном случае, вектор суммарной намагниченности изначально направлен вдоль положительного направления оси Y. Для этого примера и других примеров расфазировок представим себе этот вектор, как несколько более тонких перекрывающихся векторов от отдельных спиновых пакетов. Временная константа, описывающая поведение поперечной намагниченности, MXY, называется спин-спиновым временем релаксации, T2 и представлена на рисунке 6.13.
MXY =MXYo e-t/T2 (6.4)

Рисунок 6.13
T2 всегда меньше чем T1. Суммарная намагниченность в плоскости XY стремится к нулю, и затем продольная намагниченность возрастает до тех пор пока Mo не будет вдоль Z.
Любая поперечная намагниченность ведет себя таким же образом. Поперечный компонент вращается вокруг направления намагниченности и расфазировывается. Скорость возвращения продольной намагниченности определяется T1.
Подводя итоги, время спин-спиновой релаксации, T2, это время необходимое для уменьшения поперечной намагниченности с коэффициентом е. До этого, T2-и T1-процессы для простоты рассматривались отдельно. Например, перед возрастанием вдоль оси Z, вектора намагниченности полностью заполняли плоскость XY . В действительности же, оба процесса имеют место одновременно, лишь с тем ограничением, что T2 меньше или равно T1.
Два фактора приводящие к уменьшению поперечной намагниченности:
1) молекулярные взаимодействия (приводят к чистому T2 молекулярному эффекту)
2) изменения в Bo (приводят эффекту неоднородности T2).
Сочетание этих факторов приводит к уменьшению поперечной намагниченности. Объединенная временная постоянная носит название T2 со звездочкой и обозначается символом T2*. Зависимость T2 от молекулярных процессов и от неоднородностей магнитного поля имеет следующий вид:
1/T2* = 1/T2 + 1/T2inhomo. (6.5)
Мы только что увидели поведение спинов в лабораторной системе координат. Удобнее было бы использовать вращающуюсю систему координат, которая вращалась бы вокруг оси Z с частотой Лармора. Мы будем отличать эту систему координат от лабораторной системы по штрихам у обозначений осей X и Y, X'Y' (рисунок 6.14).

Рисунок 6.14
Вектор намагниченности, вращающейся с частотой Лармора в лабораторной системе координат, окажется неподвижным, в системе, вращающейся вокруг оси Z. Во вращающейся системе релаксация намагниченности MZ и ее равновесное значение будет выглядеть также, как выглядело в лабораторной системе (рисунок 6.15 и 6.16).
Рисунок 6.15

Рисунок 6.16
Вектор поперечной намагниченности, вращающийся вокруг оси Z с той же скоростью, что и вращающаяся система, окажется неподвижным в ней.
Вектор намагниченности, двигающийся быстрее, чем вращающаяся система, будет вращаться по часовой стрелке вокруг оси Z. Вектор намагниченности, двигающийся медленнее, чем вращающаяся система, будет вращаться против часовой стрелки вокруг оси Z.
В исследуемом объекте присутствуют спиновые пакеты, которые двигаются как быстрее, так и медленнее, чем вращающаяся система. Вследствие этого, когда средняя частота объекта равна частоте вращающейся системы, расфазировка MX'Y' выглядит как представлено на рисунке 6.17.

Рисунок 6.17
Катушка провода, помещенная вокруг оси X, при пропускании по ней постоянного электрического тока, создаст магнитное поле вдоль оси X (рисунок 6.18).

Рисунок 6.18
Переменный ток создаст магнитное поле, которое меняется по направлению.
В системе координат, вращающейся вокруг оси Z с частотой равной частоте того переменного тока, магнитное поле вдоль оси X' будет постоянным, как в случае с постоянным током в лабораторной системе (рисунок 6.19).

Рисунок 6.19
Это то же самое, что движение катушки вокруг вращающейся системы с частотой Лармора. В магнитном резонансе, магнитное поле, создаваемое катушкой при пропускании по ней переменного тока частоты Лармора, называется магнитным полем B1. Когда переменный ток в катушке включается и выключается, он создает импульсное магнитное поле B1 вдоль оси X'.
Спины в ответ на этот импульс заставляют реагируют так, что вектор суммарной намагниченности начинает вращаться вокруг направления примененного поля B1. Угол вращения зависит от продолжительности наличия поля ![]() и его величины B1.
и его величины B1.
![]() = 2
= 2![]()
![]()
![]() B1. (6.6)
B1. (6.6)
В следующих примерах будет предполагаться, что ![]() значительно больше, чем T1 и T2.
значительно больше, чем T1 и T2.
90o-импульс - это такой импульс, который вращает вектор намагниченности на 90o по часовой стрелке вокруг оси X'. 90o-импульс перемещает равновесную намагниченность на ось Y'.
В лабораторной системе, равновесная намагниченность по спирали двигается вокруг оси Z на плоскость XY.
Теперь стало понятно, почему вращающаяся система координат помогает описать поведение намагниченности в ответ на импульсное магнитное поле.
180o-импульс в 180o будет вращать вектор намагниченности на 180 градусов. Этот импульс перемещает равновесную намагниченность вдоль отрицательного направления оси Z.
Суммарная намагниченность любого направления будет подчиняться уравнению вращения. Например, вектор суммарной намагниченности направленный вдоль оси Y', после воздействия 180o-импульсом B1 вдоль оси X' станет направлен вдоль отрицательного направления оси Y'.
Вектор суммарной намагниченности между осями X' и Y' останется между ними после воздействия 180o-импульса B1 вдоль оси X'.
Матрица вращения (6.7) может быть также использована для вычисления результата вращения. ![]() - угол вращения вокруг оси X', [X', Y', Z] - начальное положение вектора и [X", Y", Z"] - положение вектора после вращения.
- угол вращения вокруг оси X', [X', Y', Z] - начальное положение вектора и [X", Y", Z"] - положение вектора после вращения.
Движения в растворе (рисунок 6.20), вызванные изменяющимися во времени магнитными полями, приводят к спиновой релаксации.

Рисунок 6.20
Поля, изменяемые во времени с частотой Лармора, вызывают переходы между спиновыми состояниями и ,следовательно, изменяют MZ. Диаграмма на рисунке 6.21 показывает поле для атома водорода 1 в молекуле воды во время его вращения во внешнем поле Bo и магнитном поле о атома водорода 2.

Рисунок 6.21
Заметим, что поле на рисунке 6.21, испытываемое атомом водорода 2, представляет собой синусоиду.
В исследуемом объекте из молекул, существует распределение частот вращения. На T1 влияют только частоты, которые равны частоте Лармора. Так как частота Лармора пропорциональна Bo, то T1 будет меняться как функция от напряженности магнитного поля, рисунок 6.22..

Рисунок 6.22
В общем, T1 обратно пропорционально числу молекулярных движений с частотой Лармора.
Распределение частот вращения зависит от температуры и вязкости раствора и представлено на рисунке 6.23 . Поэтому T1 будет изменяться как функция от температуры.

Рисунок 6.23
На частоте Лармора, обозначаемой ![]() o, T1 (280 K ) <T1 (340 K). Изменения температуры человеческого тела недостаточны для того, чтобы оказать значимое влияние на T1. Плотность же значительно отличается у разных тканей и оказывает влияние на T1, как это показано на рисунке 6.23..
o, T1 (280 K ) <T1 (340 K). Изменения температуры человеческого тела недостаточны для того, чтобы оказать значимое влияние на T1. Плотность же значительно отличается у разных тканей и оказывает влияние на T1, как это показано на рисунке 6.23..

Рисунок 6.23 - График зависимости молекулярных движений от плотности объекта исследования
Флуктуирующие поля, которые возмущают энергетические уровни спиновых состояний, вызывают расфазировку поперечной намагниченности. Это можно увидеть на графике Bo на рисунке 6.24, испытываемого атомами водорода 1 и 2 на молекуле воды.

Рисунок 6.24
Число молекулярных движений с частотой меньшей или равной частоте Лармора, обратно пропорционально T2.
В общем, из-за уменьшения в случайных движениях молекул компонентов частот, влияющих на релаксацию, с увеличением Bo время релаксации растет .
Уравнениями Блоха является система сдвоенных дифференциальных уравнений, которая используется для описания поведения вектора намагниченности в любых условиях.
 (6.8)
(6.8)
Правильное интегрирование, уравнения Блоха дает X', Y', и Z-составляющие намагниченности, как функции от времени.
Из главы 6.1 мы узнали, что магнитно-резонансная томография является технологией формирования изображения, которая в основном используется для отображения ЯМР-сигнала атомов водорода исследуемого объекта. В медицинской МРТ радиологов больше всего интересует ЯМР-сигналы воды и липидов, которые являются основными водород содержащими компонентами человеческого организма.
Основой всей магнитно-резонансной томографии является резонансное соотношение, которое показывает, что резонансная частота спина ![]() пропорциональна магнитному полю Bo, воздействующему на него.
пропорциональна магнитному полю Bo, воздействующему на него.
![]() =
= ![]() Bo
Bo
где,
![]() - является гиромагнитным отношением.
- является гиромагнитным отношением.
Например, представим, что в человеческой голове существуют лишь три небольших, четко ограниченных области с водородными спиновыми плотностями, рисунок 6.25.

Рисунок 6.25
На самом же деле, вся голова дает сигнал. Когда эти области спинов испытывают одну и ту же силу магнитного поля, ЯМР-спектр имеет лишь один пик, рисунок 6.26.

Рисунок 6.26
Если бы каждая из трех спиновых областей испытывала разное магнитное поле, можно было бы отобразить их положения. Градиент магнитного поля - это именно то, что позволяет сделать это. Градиентом магнитного поля является изменение магнитного поля в зависимости от положения. Одномерный градиент магнитного поля - это изменение относительно одного направления, тогда как двумерный градиент - изменение относительно двух. Наиболее используемым видом градиентом в магнитно-резонансной томографии является одномерный линейный градиент магнитного поля. Одномерный градиент магнитного поля вдоль оси x магнитного поля Bo означает, что магнитное поле увеличивается по направлению x. Длина вектора показывает величину магнитного поля, рисунок 6.27.

Рисунок 6.27
Градиенты магнитного поля по направлениям x, y и z обозначаются символами Gx, Gy и Gz, соответственно.
Точка в центре магнита, где (x,y,z) =0,0,0 называется изоцентром магнита, рисунок 6.28. В изоцентре магнитное поле имеет напряженность Bo и резонансная частота равна ![]() o.
o.

Рисунок 6.28
Если линейный градиент магнитного поля применить к гипотетической голове с тремя спин содержащими областями, эти области будут испытывать разные магнитные поля, рисунок 6.29..

Рисунок 6.29
Следствием этого будет являться ЯМР-спектр с более, чем одним сигналом. Амплитуда сигнала пропорциональна числу спинов в плоскости, перпендикулярной градиенту. Этот процесс называется частотным кодированием и делает резонансную частоту пропорциональной положению спина.
![]() =
= ![]() ( Bo + x Gx ) =
( Bo + x Gx ) = ![]() o +
o + ![]() x Gx (6.8)
x Gx (6.8)
x = ( ![]() -
- ![]() o ) / (
o ) / ( ![]() Gx )
Gx )
Этот принцип является основой всей магнитно-резонансной томографии. Для того чтобы понять как из ЯМР-спектра создается изображение, рассмотрим метод обратного проецирования.
Метод обратного проецирования является формой магнитно-резонансной томографией. Она была одной из первых продемонстрированных форм магнитной томографии. Метод обратного проецирования есть дополненная описанная только что процедура частотного кодирования. При этом методе вначале объект помещается в магнитное поле, рисунок 6.25.
С нескольких углов применяется одномерный градиент поля и для каждого градиента регистрируется ЯМР-спектр. К примеру, допустим, что нам необходимо изображение плоскости YZ объекта. Градиент магнитного поля по направлению +Y применяется к объекту и регистрируется ЯМР-спектр, рисунок 6.30.


Рисунок 6.30
Второй ЯМР-спектр регистрируется с градиентом углом ![]() в один градус к оси +Y. Процесс повторяется 360 раз между 0o и 359o, рисунок 6.31 .
в один градус к оси +Y. Процесс повторяется 360 раз между 0o и 359o, рисунок 6.31 .


Рисунок 6.31
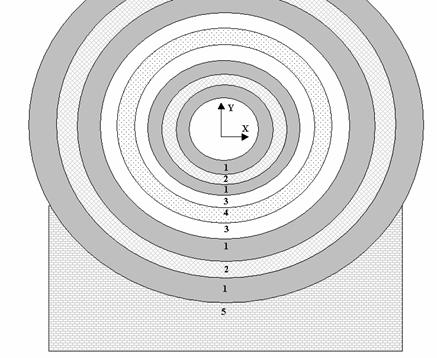
После того, как получены все данные, они могут быть восстановлены по проекциям пространства в компьютерной памяти, рисунок 6.32.

Рисунок 6.32
Изображение можно увидеть после нивелирования фоновой интенсивности, рисунок 6.33.

Рисунок 6.33
Вообще, схема обратного отображения называется обратным преобразованием Радона. В стандартной 90-FID отображающей последовательности этот процесс может применяться с помощью последующей импульсной последовательности, рисунок 6.34.

Рисунок 6.34
Изменение угла градиента ![]() достигается применением линейной комбинации двух градиентов. В данном случае Y и X градиенты применены в соотношениях, необходимых для получения нужного частотного градиента Gf.
достигается применением линейной комбинации двух градиентов. В данном случае Y и X градиенты применены в соотношениях, необходимых для получения нужного частотного градиента Gf.
Gy = Gf Sin ![]() Gx = Gf Cos
Gx = Gf Cos ![]() (6.9)
(6.9)
Для применения метода обратного проецирования необходима возможность получать изображения спинов в тонких срезах. Это выполняется при помощи градиента Gz на последнем графике. В следующей части описано как выполняется выбор среза.
Выбором слоя в МРТ является выбор спинов на плоскости, проходящей через объект. Принцип, стоящий за выбором слоя, объясняется резонансным уравнением. Выбор слоя достигается применением одномерного линейного градиента магнитного поля во время действия РЧ-импульса. 90o-импульс, примененный вместе с градиентом магнитного поля будет вращать спины, расположенные в срезе или на плоскости, проходящей через объект. Это выглядит так, как если бы у нас был куб из маленьких векторов суммарной намагниченности, рисунок 6.35.

Рисунок 6.35
Для понимания этого нам необходимо знать частоты, содержащиеся в 90o-импульсе. 90o-импульс содержит диапазон частот. Это можно увидеть, применив теорему свертки. Частоты прямоугольного 90o-импульса имеют вид sinc импульса. На рисунке 6.36 представлены действительные части этого импульса.

Рисунок 6.36
Амплитуда sinc функции имеет максимум при частоте радиочастоты, включенной и затем выключенной. Эта частота повернется на 90o, тогда как другие меньшие и большие частоты повернутся на меньшие углы.
Применение этого 90o-импульса с градиентом магнитного поля по направлению x повернет некоторые спины из плоскости, перпендикулярной оси х, на 90o градусов. Слово "некоторые" было использовано, так как B1 некоторых частот меньше, чем это необходимо для поворота на 90o. Вследствие этого, выбранные спины, фактически, не входят в состав слоя.
Решением для плохого профиля слоя является формирование 90o-импульса в виде sinc импульса. Sinc импульсимеет квадратное распределение частот. На рисунке 6.37 показаны действительные части этой функции.

Рисунок 6.37
Метод обратного проецирования может быть достигнут применением следующих импульсов, рисунок 6.38.

Рисунок 6.38
Предшествующий 90o-импульс вида sinc функции применяется вместе со срез-селектирующим градиентом. Градиент частотного кодирования включается в тот момент, когда выключается срез-селектирующий импульс. В этом примере, градиент частотного кодирования состоит из градиентов Gx и Gy. Спады свободных индукций подвергнуты преобразованию Фурье для получения частотной компоненты спектра, которая затем, для получения изображения, подвергается восстановлению по проекциям.
Метод обратного проецирования необычайно полезен для обучения, но никогда не используется в современной МРТ. Вместо него используется метод отображения с применением преобразованием Фурье.
В предыдущей разделе можно было увидеть, как обычная методика получения двумерного изображения может быть произведена с использованием метода обратного проецирования. Для того, чтобы увидеть как в настоящее время проводится МРТ преобразование Фурье, в этой главе будет представлена концепция третьего типа градиентного магнитного поля, называемая фазо-кодирующим градиентом дополненным срез-селектирующим и частотно-кодирующим градиентамиГрадиент фазового кодирования
Градиентом фазового кодирования является градиент магнитного поля Bo. Градиент фазового кодирования используется для передачи определенного фазового угла вектору поперечной намагниченности. Определенный угол зависит от того, где расположен вектор поперечной намагниченности.
Например, представим, что существует три области со спинами, рисунок 6.39. Вектор поперечной намагниченности от каждого спина поворачивается вдоль оси X.

Рисунок 6.39
Три вектора имеют одинаковый химический сдвиг и, следовательно, в одинаковом магнитном поле, Ларморова частота у них одинакова.
Если градиентное магнитное поле применяется вдоль оси X, все три вектора будут прецессировать вокруг направления примененного магнитного поля с частотой, определяемой из резонансного уравнения:
![]() =
= ![]() ( Bo + x Gx) =
( Bo + x Gx) = ![]() o +
o + ![]() x Gx (6.10)
x Gx (6.10)
Рисунок 6.40
Во время действия фазо-кодирующего градиента каждый вектор поперечной намагниченности имеет собственную, отличную от других, Ларморову частоту, рисунок 6.40. До сих пор описание фазо-кодирующего градиента не отличалось от частотно-кодирующего. С этого момента они будут отличаться. Если градиент в направлении X выключается, внешнее магнитное поле, испытываемое каждым спиновым вектором для всех практических целей, остается одинаковым. Поэтому частота Лармора каждого вектора поперечной намагниченности одинакова.
Фазовый угол, ![]() , каждого вектора, с другой стороны не одинаков. Фазовый угол, является угол между опорной осью, к примеру Y, и вектором намагниченности в момент выключения фазо-кодирующего градиента. В этом примере рассмотрены три различных фазовых угла.
, каждого вектора, с другой стороны не одинаков. Фазовый угол, является угол между опорной осью, к примеру Y, и вектором намагниченности в момент выключения фазо-кодирующего градиента. В этом примере рассмотрены три различных фазовых угла.
Как и в примере частотно-кодирующего градиента, если бы существовал какой-либо способ измерения (в данном случае фазы) векторов спина, можно было бы установить их положение вдоль оси X. Теперь можно перейти к описанию простой отображающей последовательности преобразования Фурье.
Наилучшим путем для понимания новой отображающей последовательности является изучение временной диаграммы последовательности. Временная диаграмма для отображающей последовательности показывает радиочастотные импульсы (RF), градиенты магнитного поля (GS,Gf,Gf) и сигнал, как функцию от времени, рисунок 6.41.
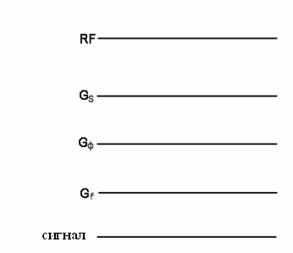
Рисунок 6.41
Простейшая отображающая последовательность преобразования Фурье содержит 90o импульс выбора среза, рисунок 6.42,

Рисунок 6.42
, импульс градиента выбора среза, рисунок 6.43,

Рисунок 6.43
, фазо-кодирующий градиентный импульс, рисунок 6.44,

Рисунок 6.44
, частотно-кодирующий градиентный импульс, рисунок 6.45,

Рисунок 6.45
и сигнал, рисунок 6.46.

Рисунок 6.46
Импульсы для трех градиентов представляют величины и длительности градиентов магнитного поля. В действительности, временная диаграмма для этой последовательности немного сложнее, она была упрощена в целях обучения. Первым событием, происходящим в этой отображающей последовательности, является включение срез-селектирующего градиента. Одновременно применяется РЧ-импульс выбора среза. РЧ-импульс выбора среза является аподизированной функцией sinc имеющей вид пакета РЧ-энергии. После окончания РЧ-импульса срез-селектирующий градиент выключается и включается фазо-кодирующий градиент. После выключения фазо-кодирующего градиента включается частотно-кодирующий градиент и регистрируется сигнал. Сигнал имеет форму спада свободной индукции. Последовательность импульсов обычно повторяется 128 или 256 раз для сбора всех необходимых данных для предоставления изображения. Время между повторениями последовательности называется временем повторения (repetition time, TR). С каждым повторением последовательности меняется величина фазо-кодирующего градиента. Величина изменяется на одинаковое значение между максимальной амплитудой градиента и минимальным значением. Пример того, как будет выглядеть последовательность из восьми шагов фазового кодирования, представлена на рисунке 6.47.

Рисунок 6.47
Срез-селектирующий градиент всегда применяется перпендикулярно плоскости среза. Фазо-кодирующий градиент применяется вдоль одной из сторон плоскости изображения. Частотно-кодирующий градиент применяется вдоль оставшегося края плоскости изображения. В таблице 6.2 показаны возможные комбинации градиентов выбора среза, фазо-кодирующего и частотно-кодирующего.
Таблица 6.2
| Градиент |
|||
| Плоскость среза |
Срез |
Фаза |
Частота |
| XY |
Z |
X или Y |
Y или X |
| XZ |
Y |
X или Z |
Z или X |
| YZ |
X |
Y или Z |
Z или Y |
Теперь рассмотрим последовательность с макроскопической точки зрения спиновых векторов. Представим куб спинов, помещенный в магнитное поле. Куб состоит из нескольких объемных элементов, каждый из которых имеет свой суммарный вектор намагниченности. Допустим, что требуется отобразить срез плоскости XY. Магнитное поле Bo направлено вдоль оси Z, рисунок 6.48 .

Рисунок 6.48
Срез-селектирующий градиент применяется вдоль оси Z. РЧ-импульс поворачивает только те спиновые пакеты внутри куба, которые удовлетворяют резонансному уравнению. Эти спиновые пакеты, рисунок 6.49, расположены на плоскости XY. Расположение плоскости вдоль оси Z по отношению к изоцентру определяется по формуле 6.11:
Z = ![]()
![]() /
/ ![]() Gs (6.11)
Gs (6.11)
где
![]() - смещение частоты относительно
- смещение частоты относительно ![]() o ( например
o ( например ![]() -
- ![]() o ),
o ),
Gs - значение срез-селектирующего градиента и
![]() - гиромагнитное соотношение.
- гиромагнитное соотношение.
Рисунок 6.49
РЧ-импульс не воздействует на спины, расположенные выше или ниже этой плоскости. Поэтому, в этом описании, ими пренебрегаем. Для облегчения понимания остановимся на подмножестве 3x3 векторов суммарной намагниченности. Изображение этих спинов на этой плоскости выглядит как на рисунке 6.50.

Рисунок 6.50
После поворота на плоскость XY эти вектора будут прецессировать с ларморовой частотой, определяемой магнитным полем, которое испытывает каждый из них. Если магнитное поле было однородным, все девять прецессионных соотношений будут равны. В отображающей последовательности фазо-кодирующий градиент применяется после срез-селектирующего. Предположим, что все это применено вдоль оси X, спины с разными местонахождениями вдоль оси X начинают прецессировать с разными частотами Лармора.Когда фазо-кодирующий градиент выключается, суммарные вектора намагниченности продолжают прецессировать с той же скоростью, но приобретают разные фазы. Фаза определяется длительностью и величиной фазо-кодирующего градиентного импульса.
После выключения фазо-кодирующего градиентного импульса включается частотно-кодирующий градиентный импульс. В этом примере частотно-кодирующий градиент имеет направление –Y, рисунок 6.51. Частотно-кодирующий градиент заставляет спиновые пакеты прецессировать со скоростями, зависящими от их Y положения. Заметим, что теперь, каждый из девяти векторов суммарной намагниченности характеризуется уникальными фазовым углом и частотой прецессии.

Рисунок 6.51
Если бы существовала возможность определения фазы и частоты сигнала из вектора суммарной намагниченности, можно было бы определить позицию каждого из девяти элементов.
Простое преобразование Фурье способно решить эту задачу для единственного вектора суммарной намагниченности, расположенного где-либо внутри пространства 3x3. Например, если одиночный вектор располагался по (X,Y) = 2,2, то его FID будет содержать синусоиду частоты 2 и фазы 2. Преобразование Фурье этого сигнала уберет один пик с частотой 2 и фазой 2. К сожалению, одномерное преобразование Фурье не способно решить задачу в случае если более чем один вектор расположен внутри матрицы 3x3 с отличающимся положением по направлению фазо-кодирующего градиента. Для каждого местоположения направления фазо-кодирующего градиента должен быть один шаг градиента фазового кодирования. Для каждого неизвестного, которое нужно найти, необходимо одно уравнение. Поэтому, если существуют три положения направлений фазового кодирования, будут необходимы три уникальных амплитуды фазо-кодирующего градиента и получение трех уникальных спадов свободной индукции. Если требуется решить 256 положений в направлении фазового кодирования, потребуется 256 различных значений фазо-кодирующего градиента и зарегистрировать 256 различных спадов свободной индукции.
Для получения изображения или картинки расположения спинов, спады свободной индукции или сигналы, описанные выше, должны быть подвергнуты преобразованию Фурье. Сначала сигналы подвергаются преобразованию Фурье по направлению X для извлечения частотного компонента информации, затем, по направлению фазового кодирования для извлечения информации о положении по направлению градиента фазового кодирования. Для понимания этого, рассмотрим несколько примеров.
Пример 1:
Существует единственный воксел с суммарной намагниченностью, рисунок 6.52.

Рисунок 6.52
Временной и частотный компоненты данных, на которые часто ссылаются как на "сырые" данные, выглядят следующим образом, рисунок 6.53.

Рисунок 6.53
Заметьте, что во временном компоненте присутствует одна частота колебания. Можно увидеть одну частоту колебания по направлению фазы. Вначале, преобразование Фурье дает серию пиков по направлению частотного кодирования с частотой, соответствующей положению X воксела со спином, рисунок 6.54.

Рисунок 6.54
( ![]() -
- ![]() o ) =
o ) = ![]() x Gf (6.11)
x Gf (6.11)
Заметьте, как изменяется амплитуда пиков, если смотреть сверху вниз по направлению фазового кодирования. Для того чтобы сделать это более понятным можно представить данные следующим образом, рисунок 6.55.

Рисунок 6.55
По направлению фазового кодирования преобразование Фурье дает единственный пик, рисунок 6.56.

Рисунок 6.55
Частота и фаза этого пика соответствует положению воксела со спинами, рисунок 6.56.

Рисунок 6.56
Пример 2:
Существует один единственный воксел с суммарной намагниченностью в новом положении частотного кодирования, но в том же положении фазового кодирования, рисунок 6.57.

Рисунок 6.57
"Сырые" данные выглядят следующим образом, рисунок 6.58.

Рисунок 6.58
Заметьте, что также существует одна частота колебания во временном компоненте, но она отличается от таковой в первом примере. Можно также увидеть одну частоту колебания в фазовом направлении. Вначале, преобразование Фурье дает серию пиков по направлению частотного кодирования с частотой, соответствующей положению X воксела о спином, рисунок 6.59.
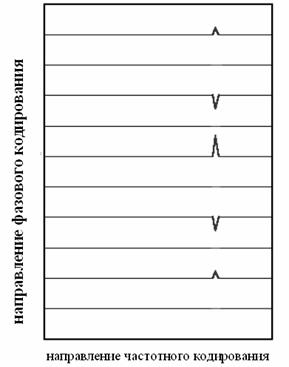
Рисунок 6.59
( ![]() -
- ![]() o ) =
o ) = ![]() x Gf (6.11)
x Gf (6.11)
Заметьте, как изменяется амплитуда пиков, если смотреть сверху вниз по направлению фазового кодирования. Для того чтобы сделать это более понятным можно представить данные следующим образом, рисунок 6.60.
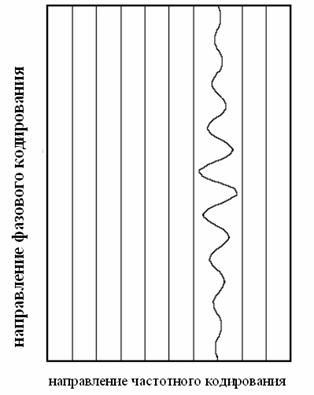
Рисунок 6.60
По направлению фазового кодирования преобразование Фурье дает единственный пик, рисунок 6.61.

Рисунок 6.61
Частота и фаза этого пика соответствует положению воксела со спинами, рисунок 6.62.

Рисунок 6.62
Пример 3:
Существует один единственный воксел с суммарной намагниченностью. Положение частотного кодирования не изменилось, но изменилось положение фазового кодирования, рисунок 6.63.

Рисунок 6.63
"Сырые" данные выглядят следующим образом, рисунок 6.64.
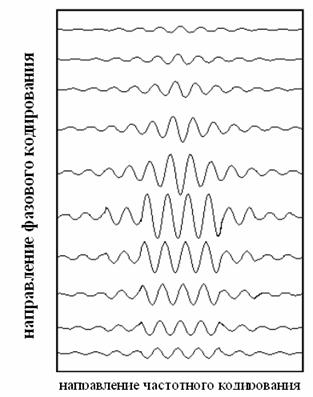
Рисунок 6.64
Заметьте, что также существует одна частота колебания во временном компоненте. Можно также увидеть одну частоту колебания в фазовом направлении. Вначале, преобразование Фурье дает серию пиков по направлению частотного кодирования с частотой, соответствующей положению X воксела со спином, рисунок 6.65.

Рисунок 6.65
( ![]() -
- ![]() o ) =
o ) = ![]() x Gf (6.12)
x Gf (6.12)
Заметьте, как изменяется амплитуда пиков, если смотреть сверху вниз по направлению фазового кодирования. Для того чтобы сделать это более понятным можно представить данные следующим образом, рисунок 6.66.

Рисунок 6.66
По направлению фазового кодирования преобразование Фурье дает единственный пик, рисунок 6.67.

Рисунок 6.67
Частота и фаза этого пика соответствует положению воксела со спинами, рисунок 6.68.

Рисунок 6.68
Пример 4:
Теперь существует два воксела с суммарной намагниченностью в отображаемой плоскости, рисунок 6.69.

Рисунок 6.69
"Сырые" данные выглядят следующим образом, рисунок 6.70.

Рисунок 6.70
Заметьте небольшое усложнение с добавлением еще одной частоты колебания (биения) во временном компоненте. Можно увидеть частоту биения колебания в фазовом направлении, также показывающим две частоты. Вначале, преобразование Фурье дает серию пиков по направлению частотного кодирования с двумя частотами, соответствующими положениям X воксела со спином, рисунок 6.71.
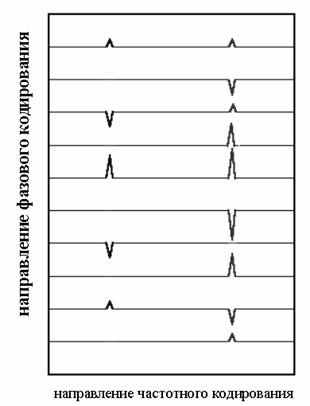
Рисунок 6.71
( ![]() -
- ![]() o ) =
o ) = ![]() x Gf (6.13)
x Gf (6.13)
Заметьте, как изменяется амплитуда пиков, если смотреть сверху вниз по направлению фазового кодирования. Для того чтобы сделать это более понятным можно представить данные следующим образом, рисунок 6.72.

Рисунок 6.72
По направлению фазового кодирования преобразование Фурье дает два пика, рисунок 6.73.

Рисунок 6.73
Частоты и фазы этих пиков соответствуют положению вокселов со спинами, рисунок 6.74.
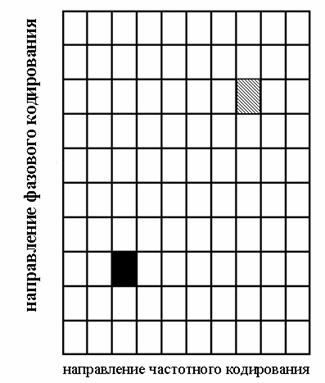
Рисунок 6.74
Подвергнутые преобразованию Фурье данные представляются как изображение переведением интенсивностей пиков в интенсивности пикселов представляющих томографическое изображение, рисунок 6.75

Рисунок 6.75
Зависимость между частотой оцифровки, fs, и шириной спектра. Та же самая зависимость применяется здесь и определяет поле обзора (field of view - FOV) по направлению частотного кодирования. Эта зависимость предполагает фазочувствительную детекцию поперечной намагниченности.
FOV = fs / ![]() Gf (6.14)
Gf (6.14)
Для избежания проблемы заворачивания, поле обзора должно быть больше, чем ширина отображаемого объекта. Проблема заворачивания будет более подробно рассмотрена в главе об артефактах.
Фазо-кодирующий градиент обычно принимает значения между максимумом G![]() max и минимумом - G
max и минимумом - G![]() max по 128 или 256 равным шагам (через равные промежутки). Отношение между FOV (полем обзора) и Gfm имеет следующий вид (6.15):
max по 128 или 256 равным шагам (через равные промежутки). Отношение между FOV (полем обзора) и Gfm имеет следующий вид (6.15):
![]() G
G![]() max dt = N / (2
max dt = N / (2![]() FOV) (6.15)
FOV) (6.15)
где N - число шагов фазового кодирования.
Интеграл ![]() G
G![]() max dt больше времени включенного фазо-кодирующего градиента. Форма фазо-кодирующего градиентного импульса не имеет значения пока площадь под импульсом остается подходящей, рисунок 6.76.
max dt больше времени включенного фазо-кодирующего градиента. Форма фазо-кодирующего градиентного импульса не имеет значения пока площадь под импульсом остается подходящей, рисунок 6.76.
Рисунок 6.76
Два элемента изображения называются разрешенными, если они различимы. Возможность разрешения двух элементов изображения является функцией от многих переменных; T2, отношение сигнал-шум, частота дискретизации, толщина среза и размер матрицы изображения - лишь некоторые из них. Разрешение является критерием качества изображения. Разрешение, как известно, обратно пропорционально расстоянию между двумя различимыми элементами изображения.
Магнитно-резонансное изображение можно представить как свертку ЯМР-спектра спинов с картой их пространственного распределения концентраций. Будет легче описывать, если представить одномерное изображение, h(x), состоящее из одного типа спинов. Если g(x) является распределением спинов, f(n) является ЯМР-спектром спинов, а f(n Gx-1 g-1) является ЯМР-спектром в единицах расстояния, в присутствии градиента магнитного поля Gx, тогда
h(x) = g(x) ![]() f(n Gx-1 g-1). (6.16)
f(n Gx-1 g-1). (6.16)
Исходя из описания пар Фурье, ширина сплошной линии в Гц при половине высоты, G, будет равна:
G = (p T2*)-1. (6.17)
Сравним результат, h(x), свертки ЯМР-спектра f(x) от данного типа спина с распределением g(x) для короткого T2* (широкой G), рисунок 6.77

Рисунок 6.77
, с таковым для длинного T2* (узкой G), рисунок 6.78

Рисунок 6.78
.
Поэтому, размер пиксела должен быть выбран приблизительно равным (6.18):
(p Gx g T2*)-1. (6.18)
На рисунке 6.79 представлены изображения бесконечно малого точечного источника ЯМР-сигнала.

Рисунок 6.79
В одном T2* длинное, а в другом T2* короткое. Оба изображения были получены при размерах пиксела значительно меньшим, чем (p Gx g T2*)-1.
В предыдущих главах описывались принципы преобразования Фурье магнитно-резонансной томографии. Все примеры были представлены для упрощенной 90-FID отображающей последовательности. И хотя все принципы были правильны, некоторые аспекты были упрощены для того, чтобы представление было более простым для понимания. Некоторые из этих принципов в данной главе будут изложены более подробно. 90-FID отображающая последовательность будет представлена как последовательность градиентного эхо. Будут изложены принципы многослойной и наклонной томографии. Также, будут изложены две новых последовательности: спин-эхо и инверсия-восстановление.
Ранее была представлена последовательность, основанная на 90-FID. Основываясь на этом представлении, время необходимое для получения изображения равняется произведению времени TR на число шагов фазового кодирования. Если TR равнялось одной секунде, а число шагов градиента фазового кодирования равнялось 256, то время, необходимое для получения изображения будет равняться 4 минутам и 16 секундам. Если необходимо получить 20 изображений интересующей нас области, то время получения изображения будет приблизительно равно 1,5 часам. Очевидно, что это является невозможным при поиске патологии. Если посмотреть на временную диаграмму отображающей последовательности с временем повторения (TR) равным одной секунде, рисунок 6.80, станет ясным, что большая часть времени последовательности остается неиспользованным.

Рисунок 6.80
Это время может использоваться для возбуждения других срезов исследуемого объекта. Единственным ограничением является то, что возбуждение одного среза не должно никак влиять на возбуждение другого среза. Это может быть достигнуто применением срез-селектирующего градиента одной величины и изменением частот 90o-импульсов, рисунок 6.81 .

Рисунок 6.81
Заметим, что три полосы частот от импульсов не перекрываются. В следующей анимации представлены три РЧ импульса, примененные за период TR. Все они имеют различные центральные частоты![]() 1,
1, ![]() 2 и
2 и ![]() 3. Как следствие, импульсы действуют на разные срезы отображаемого объекта, рисунок 6.82.
3. Как следствие, импульсы действуют на разные срезы отображаемого объекта, рисунок 6.82.

Рисунок 6.82
Сигнал может быть получен с помощью спин-эхо последовательности. Преимуществом спин-эхо последовательности является то, что она вносит в сигнал зависимость от T2. Ввиду того, что некоторые ткани и патологическое образования имеют близкие по значению T1, но разные значения T2, использование отображающих последовательности, производящих изображения с зависимостями от T2, становится обоснованным. Временная диаграмма для спин-эхо отображающей последовательности имеет графы для РЧ импульсов, градиентов в магнитном поле и сигнала представлена ниже, рисунок 6.83.
Срез-селектирующий 90o-импульс применяется вместе со срез-селектирующим градиентом.

Рисунок 6.83
После прохождения периода времени, равного TE/2, следуют срез-селектирующий 180o-импульс вместе со срез-селектирующим градиентом, рисунок 6.84.

Рисунок 6.84
Фазо-кодирующий градиент применяется между 90o- и 180o- импульсами, рисунок 6.85.

Рисунок 6.85
Как и в предыдущей отображающей последовательности, фазо-кодирующий градиент изменяется по 128 или 256 значениям междуG![]() m и -G
m и -G![]() m. Фазо-кодирующий градиент может применяться после 180o-импульса, однако, если мы хотим уменьшить период TE, импульс применяется между 90o- и 180o- РЧ импульсами, рисунок 6.86.
m. Фазо-кодирующий градиент может применяться после 180o-импульса, однако, если мы хотим уменьшить период TE, импульс применяется между 90o- и 180o- РЧ импульсами, рисунок 6.86.

Рисунок 6.86
Частотно-кодирующий градиент применяется после 180o-импульса, во время регистрации эхо, рисунок 6.87.

Рисунок 6.87
Регистрируемый сигнал является эхо. Спад свободной индукции, который наблюдается после каждого 90o-импульса, никак не используется. Между 90o- и 180o- импульсами применяется один дополнительный градиент, рисунок 6.88

Рисунок 6.88
Этот градиент направлен так же, как и частотно-кодирующий градиент. Он расфазировывает спины так, что они возвращаются в одну фазу в самом центре эхо. Этот градиент оказывает такой эффект, что к началу регистрации эхо сигнал будет находиться на краю k-пространства.
Вся последовательность повторяется каждые TR секунд до тех пор, пока не будут записаны все шаги фазового кодирования.
Ранее мы увидели, что сигнал магнитного резонанса может быть получен с помощью последовательности инверсии-восстановления. Преимуществом использования последовательности инверсии-восстановления является то, что она позволяет избавлять сигнал от одного компонента вследствие его T1. Напомним, что при TI = T1 ln2 интенсивность сигнала равна нулю. Рассмотрим последовательность инверсии-восстановления, в которой для регистрации намагниченности используется спин-эхо последовательность. РЧ импульсы - 180-90-180. Последовательность инверсии восстановления, в которой используется 90-FID регистрация сигнала, похожа, с тем исключением, что 90-FID заменяется на спин-эхо часть последовательности.
Временная диаграмма для отображающей последовательности инверсии-восстановления имеет графы для РЧ импульсов, градиентов в магнитном поле и сигнала, рисунок 6.89.

Рисунок 6.89
Срез-селектирующий 180o-импульс применяется вместе со срез-селектирующим градиентом, рисунок 6.90.
Рисунок 6.90
После прохождения периода времени равного TI, применяется спин-эхо последовательность, рисунок 6.91.

Рисунок 6.91
Оставшаяся часть последовательности эквивалентна спин-эхо последовательности. Эта часть спин-эхо регистрируется как намагниченность во время TI после первого 180o-импульса. (Вместо спин-эхо может быть использована 90-FID последовательность). Все РЧ импульсы в последовательности спин-эхо являются импульсами выбора среза. РЧ импульсы применяются вместе с градиентами выбора среза. Между 90o- и 180o- импульсами следует фазо-кодирующий градиент. Фазо-кодирующий градиент изменяется, принимая 128 или 256 значений между G![]() m и -G
m и -G![]() m.
m.
Фазо-кодирующий градиент не может быть применен после первого 180o-импульса, так как на этом этапе еще нет поперечной намагниченности, фазу которой надо было бы кодировать. Частотно-кодирующий градиент применяется за вторым 180o-импульсом, и в это время регистрируется эхо.
Эхо регистрируется как сигнал. После 90o-импульса FID не используется. Расфазирующий градиент следует между 90o- и 180o- импульсами для установки начала получения сигнала на край k-пространства, как это было описано в разделе спин-эхо томографии. Вся последовательность повторяется каждые TR секунд.
У всех ранее описываемых последовательностей есть один существенный недостаток. Для максимального сигнала им всем необходима поперечная намагниченность, которая бы приходила в свое равновесное состояние вдоль оси Z до повторения последовательности. При большом T1 это может существенно удлинять время отображающей последовательности. Если же намагниченность восстанавливается в равновесие не полностью, сигнал слабее, чем если бы происходило полное восстановление, рисунок 6.92.

Рисунок 6.92
Если намагниченность повернута на угол ![]() , меньший чем 90o, ее компонент Mz приходит в равновесие гораздо быстрее, но сигнал будет слабее, поскольку он будет пропорционален Sin
, меньший чем 90o, ее компонент Mz приходит в равновесие гораздо быстрее, но сигнал будет слабее, поскольку он будет пропорционален Sin![]() , рисунок 6.93
, рисунок 6.93

Рисунок 6.93
Поэтому приходится жертвовать сигналом ради времени сканирования. В некоторых случаях собирается и усредняется несколько изображений для восстановления потерянного сигнала.
Последовательность градиентного эхо является применением этих принципов. На рисунке 6.94 представлена ее временная диаграмма.

Рисунок 6.94
В отображающей последовательности градиентное эхо на объект воздействует срез-селектирующий РЧ импульс, рисунок 6.95.

Рисунок 6.95
Этот РЧ импульс обычно производит поворот на угол между 10o и 90o. Срез-селектирующий градиент применяется вместе с РЧ импульсом., рисунок 6.96

Рисунок 6.96
Далее следует фазо-кодирующий градиент, рисунок 6.97.

Рисунок 6.97
Как и в других последовательностях фазо-кодирующий градиент меняется между G![]() m и -G
m и -G![]() m по 128 или 256 значениям.
m по 128 или 256 значениям.
Рафазирующий частотно-кодирующий градиент применяется одновременно с фазо-кодирующим градиентом для того, чтобы заставить спины находиться в фазе в середине периода сбора данных, рисунок 6.98.

Рисунок 6.98
Этот градиент противоположен по знаку, включенному во время регистрации сигнала, частотно-кодирующему градиенту. Эхо получается во время включения частотно-кодирующего градиента потому, что этот градиент расфокусировывает расфазировку, которая проявляется вследствие расфазирующего градиента, рисунок 6.99.

Рисунок 6.99
Период времени, называемый временем эхо (echo time - TE) определяется как время между началом РЧ импульса и максимумом сигнала, рисунок 6.100.

Рисунок 6.100
Последовательность повторяется каждые TR секунд. Период TR может быть очень мал (десятки миллисекунд).
Для того чтобы патологическое образование или ткань были различимыми магнитно-резонансное изображение должна быть контрастной, то есть должна быть разница в интенсивностях сигнала между ними и прилежащими тканями. Интенсивность сигнала, S, определяется сигнальным уравнением для определенной используемой импульсной последовательности. Некоторые внутренние переменные представлены в таблице 6.3
Таблица 6.3
| Спин-решеточное время релаксации, T1 |
| Спин-спиновое время релаксации, T2 |
| Спиновая плотность, |
| T2* |
Спиновой плотностью является концентрация спинов, несущих сигнал. Инструментальными переменными являются переменные представлены в таблице 6.4.
Таблица 6.4
| Время повторения, TR |
| Время эхо, TE |
| Время инверсии, TI |
| Угол поворота, |
| T2* |
T2* попадает в две таблицы, так как оно содержит компонент, зависящий от гомогенности магнитного поля и молекулярных движений. Сигнальные уравнения для импульсных последовательностей выглядят следующим образом:
Спин-эхо
S = k ![]() (1-exp(-TR/T1)) exp(-TE/T2) (6.19)
(1-exp(-TR/T1)) exp(-TE/T2) (6.19)
Инверсия-восстановление(180-90)
S = k ![]() (1-2exp(-TI/T1)+exp(-TR/T1)) (6.20)
(1-2exp(-TI/T1)+exp(-TR/T1)) (6.20)
Инверсия-восстановление(180-90-180)
S = k ![]() (1-2exp(-TI/T1)+exp(-TR/T1)) exp(-TE/T2) )) (6.21)
(1-2exp(-TI/T1)+exp(-TR/T1)) exp(-TE/T2) )) (6.21)
Градиентное эхо
S = k ![]() (1-exp(-TR/T1)) Sin
(1-exp(-TR/T1)) Sin![]() exp(-TE/T2*) / (1 -Cos
exp(-TE/T2*) / (1 -Cos![]() exp(-TR/T1)) )) (6.22)
exp(-TR/T1)) )) (6.22)
В каждом уравнений (6.19)-(6.22) S представляет амплитуду сигнала в частотной компоненте спектра. Число k является константой пропорциональности, которая зависит от чувствительности контура регистрации сигнала томографа. Значения T1, T2, и ![]() специфичны для патологического образования или ткани. В таблице 6.5 приведены диапазоны значений T1, T2, и
специфичны для патологического образования или ткани. В таблице 6.5 приведены диапазоны значений T1, T2, и ![]() при 1.5 Т для тканей, присутствующих на магнитно-резонансной томограмме человеческой головы
при 1.5 Т для тканей, присутствующих на магнитно-резонансной томограмме человеческой головы
Таблица 6.5
| Tкань |
T1 (с) |
T2 (мс) |
r (Основано на |
| ЦСЖ |
0.8 - 20 |
110 - 2000 |
70-230 |
| Белое вещество |
0.76 - 1.08 |
61-100 |
70-90 |
| Серое вещество |
1.09 - 2.15 |
61 - 109 |
85 - 125 |
| Менингиальная ткань |
0.5 - 2.2 |
50 - 165 |
5 - 44 |
| Мышцы |
0.95 - 1.82 |
20 - 67 |
45 - 90 |
| Жировая ткань |
0.2 - 0.75 |
53 - 94 |
50 - 100 |
Контраст, C, между двумя тканями A и B будет равен разнице между сигналом ткани A, SA и сигналом ткани B, SB.
C = SA - SB (6.23)
SA и SB определяются из приведенных выше сигнальных уравнений. Для двух любых тканей существует набор инструментальных параметров, которые дают максимальный контраст. Например, в спин-эхо последовательности контрастность между двумя тканями есть функция TR, графически представленная сопровождающей кривой.
Для того чтобы быть уверенным в том, что сигналы от всех шагов фазового кодирования приобрели одинаковые свойства, к каждому процессу сбора данных для изображения к последовательности прибавляется несколько уравновешивающих циклов. Необходимость этого можно увидеть, рассмотрев компоненты MZ и MXY, как функцию от времени в последовательности типа 90-FID. Заметим, что поперечная намагниченность от 90o-импульса достигает равновесия после нескольких циклов TR. Это увеличивает время отображения на несколько периодов TR.
Комитет магнитного резонанса для обозначения механизма преобладающей контрастности изображения принял следующую номенклатуру. Изображения, контраст которых в основном определяется разностями T1 тканей, называются T1 -взвешенными изображениями. Аналогично для T2 и ![]() , изображения называются T2-взвешенными протон-взвешенными. В таблице 6.6 приведен набор условий, необходимых для получения взвешенных изображений.
, изображения называются T2-взвешенными протон-взвешенными. В таблице 6.6 приведен набор условий, необходимых для получения взвешенных изображений.
Таблица 6.6
| Взвешенность |
Значение TR |
Значение TE |
| T1 |
< = T1 |
< < T2 |
| T2 |
> > T1 |
> = T2 |
|
|
> > T1 |
< < T2 |
Поразительно то, что выбор инструментальных параметров TR, TE, TI и ![]() влияет на контраст между различными тканями мозга.
влияет на контраст между различными тканями мозга.
Артефактом изображения является любая черта, не присутствующая в отображаемом объекте, но присутствующая на изображении. Артефакт изображения иногда является результатом неправильного действия при использовании томографа, а, иногда, является следствием естественных процессов или свойств человеческого организма. Обычно артефакты классифицируются в соответствии с их источником. Далее будут представлены примеры каждого артефакта.
РЧ квадратурные артефакты являются следствиями проблем схемы РЧ детекции. Если быть более точным, РЧ квадратурные артефакты обычно связаны с описанным в главе об аппаратуре фазочувствительным детектором. Эти проблемы возникают из-за неправильных действий над двумя каналами детектора. Например, если на выходе одного из усилителей будет присутствовать смещение постоянной составляющей, подвергнутые преобразованию Фурье данные могут отобразить яркое пятно в центре изображения. Если один канал детектора имеет больший коэффициент усиления, это приведет к появлению ложных изображений диагонально на изображении.
Вся магнитно-резонансная томография предполагает гомогенность магнитного поля Bo. Негомогенное поле Bo будет искажать изображения. Искажение может быть пространственным, интенсивностным или оба одновременно. Интенсивностные искажения являются результатом локальной негомогенности поля, которое может быть больше или меньше, чем остальные части отображаемого объекта. T2* в этой области отличается и, поэтому, сигнал может отличаться. Например, если гомогенность ниже, T2* будет короче, и сигнал будет меньше. Пространственное искажение является результатом протяженных градиентов поля в Bo, которые постоянны. Они заставляют спины резонировать с частотами Лармора, отличными от предписанных отображающей последовательностью.
Артефакты, возникающие из-за проблем в системе градиентов иногда очень похожи на те, что связаны с негомогенностью поля Bo. Градиент, непостоянный по направлению градиента будет искажать изображение. Обычно, это является возможным только при повреждении градиентной катушки. Другие, артефакты, связанные с градиентом, являются результатом неправильных токов, проходящих по градиентным катушкам. На следующем изображении частотно-кодирующий градиент (кодирование лево/право) функционирует лишь наполовину от ожидаемого значения.
Проблемой РЧ негомогенности является изменение интенсивности поперек изображения. Причинами этого могут являться либо неоднородность поля B1, либо неоднородность чувствительности в только-принимающей катушке. Некоторые РЧ катушки, как, например, поверхностные, исходно имеют неоднородность в чувствительности и всегда будут приводить к этому артефакту. Наличие этого артефакта при использовании других катушек говорит или о неисправности какого-либо элемента РЧ катушки, или о наличии неферромагнитного материала в отражаемом объекте. Например, металлический объект, препятствующий проходу РЧ поля в ткань, будет приводить к занулению сигнала в изображении.
Как и следует из названия, артефакты движения вызываются движениями отображаемого объекта во время отображающей последовательности. Движение всего объекта во время отображающей последовательности в общем приводит к размыванию всего изображения с наличием посторонних изображений по направлению фазового кодирования. Движение небольшой части отображаемого объекта приводит к размыванию небольшой части изображения.
Решением для артефакта движения является иммобилизация пациента или отображаемого объекта. Часто движение бывает вызвано сердечными сокращениями или дыханием пациента. Ни один из них не может быть устранен законным путем. Решением в этих случаях является подстраивание отображающей последовательности под сердечный или дыхательные циклы пациента.
Артефакт химического сдвига вызывается разницей химических сдвигов (ларморовой частоты) жира и воды. Этот артефакт проявляет себя рассовмещением между пикселами жира и воды на изображении.
Разница в химическом сдвиге составляет приблизительно 3.5 ppm, что при 1,5 Тесла соответствует разности в частотах жира и воды приблизительно 220 Гц. Во время поцедуры выбора среза существует небольшое смещение между расположением тех спинов жира и воды, которые начали вращаться благодаря РЧ-импульсу. Во время работы фазо-кодирующего градиента спины жира и воды приобретают фазу с различными скоростями. В результате спины жира и воды, находясь в одном и том же вокселе, кодируются так, как будто они находятся в разных вокселах.
Величина эффекта зависит от величины магнитного поля Bo. Чем больше Bo, тем больше результат. При 1,5 Тесла эффект составляет приблизительно 2 пиксела. При 0,5 Тесла эффект составляет меньше чем один пиксел.
Артефактом частичного объема является любой артефакт, вызываемый размером воксела изображения. Например, если воксел очень маленький, он может содержать только сигнал жира или воды. Воксел большего размера может содержать комбинацию из двух и, следовательно, обладать интенсивностью сигнала равной взешенному среднему значению от процентного содержания воды и жира в вокселе. Другим проявлением этого типа артефакта является потеря разрешения, вызванная множественными признаками, представленными в вокселе изображения. Решением проблемы артефакта частичного объема является меньший размер воксела, что, впрочем, может привести к ухудшению соотношения сигнал-шум в изображении.
На рисунке 6.101 представлена схема основных систем магнитно-резонансного томографа и некоторые из основных разводок. Этот обзор кратко обозначит функцию каждого из них.

Рисунок 6.101
Вверху схемы расположены компоненты томографа, находящиеся в комнате сканирования магнитно-резонансного томографа. Поле Bo, необходимое для процесса сканирования, создается магнитом (magnet). Для создания градиента в Bo по направлениям X, Y и Z, внутри магнита расположены градиентные катушки (gradient coils). Внутри градиентных катушек находится РЧ катушка (RF coil). РЧ катушка создает магнитное поле B1, необходимое для поворота спинов на 90o или 180o. РЧ катушка также регистрирует сигнал от спинов внутри тела. Пациент располагается на управляемом компьютером столе пациента (patient table). Точность установки позиции составляет
"Сердцем" томографа является компьютер (computer). Он контролирует все компоненты томографа. Источник РЧ-импульсов (RF source) и программатор импульсов (pulse programmer) являются РЧ компонентами, находящимися под контролем компьютера. Источник генерирует синусоиду нужной частоты. Программатор импульсов придает им форму sinc импульсов. РЧ усилитель (RF amplifier) увеличивает мощность импульсов от милливатт до киловатт. Компьютер также управляет программатором градиентных импульсов (gradient pulse programmer), который определяет вид и амплитуду каждого из трех градиентных полей. Градиентный усилитель (gradient amplifier) увеличивает мощность градиентных импульсов до уровня, достаточного для управления градиентными катушками.
Матричный процессор (array processor), имеющийся у некоторых томографов - это устройство, позволяющее проводить двумерное преобразование Фурье за доли секунды. Компьютер передает преобразование Фурье этому, более быстрому, устройству.
Оператор томографа производит ввод в компьютер через консоль управления (control console). Отображающая последовательность выбирается и модифицируется на консоли. Оператор может просматривать изображения на дисплее, расположенном на консоли, или распечатывать их на фотопринтере (film printer).
Следующие три части этой главы дают более подробное описание магнита, градиентных катушек, РЧ катушек и РЧ детекторе магнитно-резонансного томографе.
Магнит является самой дорогой частью магнитно-резонансного томографа. Большинство магнитов являются сверхпроводящими. На рисунке 6.102 представлена фотография сверхпроводящего магнита томографа силой 1.5 Тл.

Рисунок 6.102
Сверхпроводящий магнит - это электромагнит сделанный из проводника, обладающего сверхпроводимостью. Провод, сделанный из сверхпроводящего материала, охлажденный жидким гелием до температуры, близкой к абсолютному нулю (-273.15o C или 0 K), имеет почти нулевое сопротивление. После пропускания тока по катушке, он продолжает проходить по ней пока катушка содержится при температуре жидкого гелия. (Некоторые потери происходят в связи с бесконечно малым сопротивлением катушки. Эти потери за год имеют размерность миллионных долей от основного магнитного поля.)
На рисунке 6.103 показано поперечное сечение сверхпроводящего магнита томографа.
1- вакуум
2- жидкий нитроген
3- жидкий гелий
4- сверхпроводящая катушка
5- контейнер - поддержка
Рисунок 6.103
Длина сверхпроводящей проволоки обычно составляет несколько километров. Катушка провода охлаждается до температуры 4.2К, погружением в жидкий гелий (liquid helium). Катушка и жидкий азот находятся в большом криостате (или сосуде Дьюара). Этот сосуд обычно окружен сосудом Дьюара с жидким азотом (77.4К), который выполняет роль термоизолятора между комнатной температурой (293К) и жидким гелием.
Градиентные катушки создают градиенты в магнитном поле Bo. Эти катушки содержатся при комнатной температуре. Они создают необходимый градиент благодаря своей конфигурации. Так как наиболее часто используется сверхпроводящий магнит с горизонтальной осью, система градиентных катушек будет описана именно для него.
Пользуясь стандартной в магнитном резонансе координатной системой, градиент Bo по направлению Z достигается антигельмгольцевой катушкой. Ток проходит в противоположных направлениях в двух катушках, создавая градиент магнитного поля между двумя катушками. Поле В одной катушки прибавляется к полю Bo, в то время как поле В в центре другой катушки отнимается от поля Bo.(рисунок 6.104)

Рисунок 6.104
Градиенты X и Y в поле Bo создаются парой катушек имеющих вид восьмерки (figure-8 coil). Катушки, имеющие вид восьмерки, по направлению Х создают градиент в Bo по этому направлению, благодаря направлению тока, проходящего через катушки, рисунок 6.105.
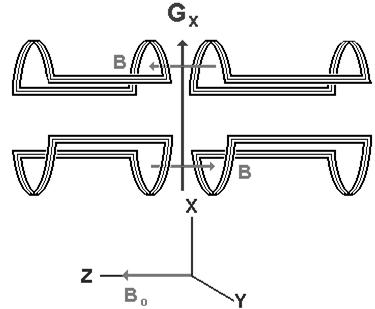
Рисунок 6.105
Катушки, имеющие вид восьмерки, по направлению Y создают аналогичный градиент в Bo вдоль оси Y, рисунок 6.106.

Рисунок 6.106
РЧ катушки создают поле B1, которое поворачивает суммарную намагниченность в импульсной последовательности. Они также регистрируют поперечную намагниченность, в то время как она прецессирует в плоскости XY. РЧ катушки можно разделить на три основные категории: 1) и передающие и принимающие катушки, 2) только принимающие катушки и 3) только передающие катушки. И передающие и принимающие катушки служат излучателями полей B1 и приемниками РЧ энергии от отображаемого объекта. Только передающая катушка используется для создания поля B1 и только принимающая катушка используется в сочетании с предыдущей для детекции или приема сигнала от спинов отображаемого объекта. Существует несколько разновидностей каждой из катушек. РЧ катушку томографа можно сравнить с объективами фотоаппарата. Фотограф использует один объектив для снимка с близкого расстояния и другой для широкоугольного снимка с дальнего расстояния. Как хороший фотограф имеет несколько объективов, так и в хорошем томографическом кабинете имеется несколько отображающих катушек для того, чтобы можно было справиться с разными ситуациями в томографии.
Отображающая катушка должна резонировать или эффективно накапливать энергию при частоте Лармора. Все отображающие катушки состоят из индуктора, индуктивных элементов и емкостных элементов. Резонансная частота, ![]() , РЧ катушки определяется индуктивностью (L) и емкостью (C) индуктивно-емкостной цепи.
, РЧ катушки определяется индуктивностью (L) и емкостью (C) индуктивно-емкостной цепи.

Некоторые типы отображающих катушек должны настраиваться для каждого пациента физическим изменением емкости переменного конденсатора. Другим требованием отображающей катушки является то, что поле B1 должно быть перпендикулярным магнитному полю Bo.
Некоторые из наиболее распространенных отображающих катушек изображены на рисунках (6.107 - 6.116). Описано направление поля B1, метод использования и применение.

Рисунок 6.107 - Соленоидальная катушка

Рисунок 6.108 - Поверхностная катушка
Поверхностные катушки широко распространены, так как они являются только принимающими катушками и имеют хорошее отношение сигнал-шум для близлежащих к катушке тканей. На рисунке 6.109 пример изображения нижнего отдела позвоночника человека, полученного поверхностной катушкой.

Рисунок 6.109
На рисунке 6.110 изображение плоской круглой катушки с соединяющим кабелем.
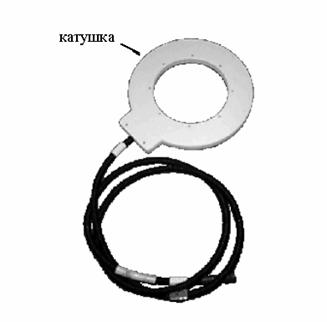
Рисунок 6.110
Кабель подключается к томографу.
На рисунке 6.111 изображение поверхностной катушки, согнутой для соответствия задней стороне ноги на уровне коленного сустава.
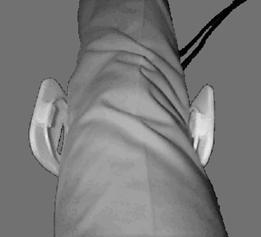
Рисунок 6.111

Рисунок 6.112 - Катушка "птичья клетка"
Катушка "птичья клетка" является одной из катушек для отображения головы или мозга. На рисунке 6.113 изображение человеческой головы внутри катушки типа "птичьей клетки".

Рисунок 6.113
Все изображения головы в этом гипертекстовом учебнике были получены с использованием катушки "птичья клетка".
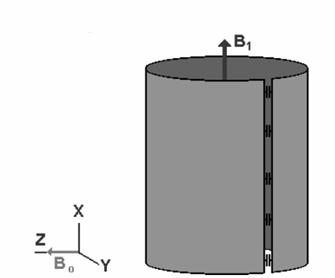
Рисунок 6.114 - Одновитковая соленоидальная катушка
Одновитковая соленоидальная катушка используется для отображения конечностей, таких как запястье, и молочных желез. На рисунке 6.115 фотографии показана одновитковая соленоидальная катушка вокруг запястья человека.

Рисунок 6.115

Рисунок 6.116 - Седловидная катушка
Соленоидальная катушка, катушка "птичья клетка", одновитковая соленоидальная и седловидная катушки обычно работают как передатчики и приемники РЧ энергии. Поверхностная катушка обычно работает только как принимающая катушка. При использовании поверхностной катушки, в томографе используется большая катушка для излучения РЧ энергии в виде 90o- и 180o-импульсов.
Фазочувствительным детектором является устройство, которое отделяет сигналы Mx' и My' от сигнала РЧ катушки. Таким образом, его можно представить как преобразователь лабораторной системы координат во вращающеюся. Основой фазочувствительного детектора является устройство, получившее название двойного балансированного преобразователя частоты. Двойной балансированный преобразователь частоты имеет два входа и один выход. Если сигналами на входе являются Cos(A) и Cos(B), то на выходе получаются 1/2 Cos(A+B) и 1/2 Cos(A-B). Поэтому, это устройство часто называют детектором произведения, так как произведением Cos(A) и Cos(B) является то, что получается на выходе.
Хотя для получения изображений в МРТ ионизирующее излучение не используется, существуют важные положения о безопасности, которые необходимо знать. К ним относятся использования сильных магнитных полей, радиочастотного излучения, меняющихся со временем магнитных полей, криогенных жидкостей и градиентов магнитного поля.
Магнитные поля от больших магнитов могут буквально поднимать и притягивать большие ферромагнитные предметы в отверстие магнита. Меры предосторожности должны быть приняты, чтобы не допустить присутствия ферромагнитных предметов вблизи магнита по двум следующим причинам. Во-первых, они могут ранить или убить человека, находящегося внутри отверстия магнита. Во-вторых они могут серьезно повредить магнит и отображающие катушки. Сила, оказываемая на большой металлический объект, такой как швабра, может повредить концентрические криогенные сосуды Дьюара внутри магнита. Кинетическая энергия такого объекта, затягиваемого в магнит, может разбить РЧ отображающую катушку.
Схожие силы действуют на ферромагнитные металлические имплантанты из чужеродного вещества в процессе отображения. Эти силы могут вытягивать эти объекты, разрезая и сдавливая здоровые ткани. По этим причинам, лица с чужеродными металлическими предметами не могут подвергаться магнитно-резонансной томографии. Существуют также дополнительные положения о воздействии магнитных полей на электронные цепи, в особенности на кардиостимуляторы. Сильное магнитное поле, действующее на человека с кардиостимулятором, может индуцировать токи в цепях кардиостимулятора, которые, в свою очередь, могут вызвать отказ последнего и, возможно, смерть. Магнитные поля также затирают кредитные карточки и магнитные носители информации.
Положения о безопасности United States Food and Drug Administration (USFDA) утверждают, что поля силой не превышающие 2.0 Тесла могут использоваться в обычном порядке. Лица с кардиостимуляторами не могут находиться в магнитном поле, превышающем 5 Гаусс. Магнитное поле в 50 Гаусс затирает магнитные носители информации.
Радиочастотная энергия отображающей частоты может вызывать нагревание тканей тела. USFDA рекомендует ограничение времени РЧ облучения. Ограничением является удельная скорость поглощения (specific absorption rate - SAR) УСП.
УСП = Джоуль РЧ / Секунда / кг веса тела = Ватт/кг
Рекомендуемое ограничение по УСП зависит от анатомических особенностей пациента. Для всего тела УСП должна быть меньше чем 0.4 Ватт/кг. Усредненное значение УСП для головы должно быть меньше, чем 3.2 Ватт/кг. Любая последовательность импульсов не должна поднимать температуру более чем на 1o Цельсия и не более чем 38o C для головы, 39o C для туловища и 40o C для конечностей. Некоторые РЧ катушки, например поверхностные, в неисправном состоянии могут вызывать ожоги у пациента. Для должной работы этих катушек, за ними необходим уход.
Рекомендации USFDA по скорости изменения магнитного поля утверждают, что dB/dt системы должно быть меньше, чем требуется для возбуждения периферических нервных окончаний.
Отображающие градиенты производят высокого уровня акустический шум. OSHA ограничивает пиковый акустический шум 200 Паскалями или 140 дБ по отношению к 20 микропаскалям. В таблице 6.7 представлены примеры звуков, возникающих при включении и выключении градиентов магнитного поля в различных отображающих последовательностях.
Таблица 6.7
| Последовательность |
TR (мс) |
TE (мс) |
Срезов |
Звук |
| Спин-эхо |
500 |
35 |
1 |
|
| 200 |
1 |
|||
| 15 |
10 |
|||
| Эхо-планарная |
120 |
54 |
10 |
|
| Градиентное эхо |
16.7 |
4 |
19 |
МР-фанотомом является искусственный объект, который может отображаться для проверки работы магнитно-резонансного томографа. Фантомы используются вместо "нормативного человека", так как намного проще установить стандартный фантом на каждом из множества МРТ по всему миру, чем перевозить "нормативного человека" для исследования из одного места в другое. Фантомы сделаны из материалов, имеющих магнитно-резонансный сигнал. Многие материалы в МР-фантомах используются в качестве веществ, поддерживающих сигнал. Некоторыми из них являются водные парамагнитные растворы: чистые желатиновые гели, агар, поливиниловый спирт, силикон, полиакриламид или агароза; гели с органическими добавками, гели с парамагнитными добавками и обратные растворы мицелле.
В МР-фантоме вода чаще всего используется в качестве поддерживающего сигнал вещества. Часто бывает необходимо настраивать времена спин-решеточной (T1) и спин-спиновой (T2) релаксаций водных растворов, так чтобы можно было получать изображения за подходящие периоды времени (например короткое TR). Парамагнитные ионы металлов обычно используются для настройки времен релаксаций ядер водородов в воде. В таблице 6.8 приведены приблизительные значения T1 и T2 водных растворов различных парамагнитных веществ при 1,5 Тл.
Таблица 6.8
| Водный раствор никеля |
| T1(с) = 1/(632 [Ni (моль/л)] +0.337) |
| Никель в 10 вес.% желатине |
| T1(с) = 1/(732 [Ni (моль/л)] +0.817) |
| Водный раствор кислорода |
| T1(с) = 1/(0.013465 [O2 (мг/л)] + 0.232357) |
| Водный раствор марганца |
| T1(с) = 1/(5722 [Mn (моль/л)] +0.0846) |
Существуют два основных вида МР-фантомов: разрешающий и РЧ-однородностный. Как следует из названий, первый используется для тестирования разрешения, а другой - РЧ-однородности.
Разрешающий фантом может использоваться для тестирования нескольких пространственных характеристик томографа. Эти пространственные характеристики включают: плоскостную разрешающую способность, толщину срезов, линейность и отношение сигнал-шум в зависимости от положения. Разрешающие фантомы обычно сделаны из пластмассы. Участки внутри фантома удаляются для формирования тестового рисунка. Фантом заполняется водным раствором. При отображении, полученное изображение отображает сигнал от воды в тех участках, где пластик удален. Некоторые фантомы имеют также стандарты сигналов с известными значениями T1, T2 и r, что позволяет использовать эти фантомы для проверки соотношений контраст-шум.
Однородностные фантомы используются для тестирования пространственной однородности передаваемых и принимаемых радиочастотных магнитных полей. Передаваемым РЧ-полем (B1T) является поле B1, которое используется для вращения намагниченности. Принимаемым РЧ-полем (B1R) является чувствительность РЧ-катушек к сигналу от прецессирующих спиновых пакетов. В идеале, для большинства передающих/принимающих катушек B1T должно быть пространственно однородно для одинакового вращения спинов и B1R должно быть пространственно однородно для одинаковой чувствительности по всему отображаемому объекту.
Для измерения однородности B1T и B1R.необходимо несколько изображений РЧ-однородностного фантома.
|
|