Гидролокация - определение места нахождения подводного объекта либо по звуковым сигналам, испускаемым самим
объектом (пассивная Г.), либо по отражению или рассеянию от объекта специально
излучённого звукового сигнала (активная Г.). Объектами могут быть надводный
корабль, подводная лодка, косяк рыб, скала на дне и пр.
При пассивной Г. (шумопеленговании)
направление на источник звука определяют, исследуя пространственную структуру
звукового поля, создаваемого источником. При этом используются разл. методы
пеленгования: максимальный, когда остронаправленную гидроакустическую антенну располагают так, чтобы принятый сигнал был максимальным; нулевой, где используют
две антенны, диа-
граммы направленности к-рых
так сдвинуты друг относительно друга, чтобы суммарная диаграмма имела глубокий
минимум, направление на источник звука получают по минимуму сигнала от него;
этот способ имеет большую точность из-за того, что крутизна диаграмм направленности
антенн вблизи нуля существенно больше, чем вблизи максимума; фазовый, в к-ром
определяют разность фаз между сигналами, принятыми двумя разнесёнными в пространстве
приёмными антеннами; корреляционный- разновидность фазового, в нём по измерению
взаимной корреляции определяют относительный временной сдвиг прихода сигнала
на два разнесённых приёмника. Как правило, используется комбинация неск. методов,
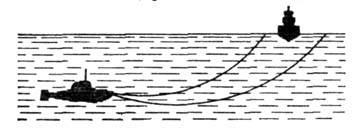
при этом азимутальное направление на объект соответствует измеренному, а для
определения истинного направления по вертикали следует вводить поправку на рефракцию
(рис.). Расстояние до объекта и траекторию его перемещения можно определять,
измеряя направление на него из неск. точек, разнесённых в пространстве.
Схема работы гидролокатора.
Ход лучей соответствует типичным условиям полярных районов.
Шумопеленгаторные системы
могут устанавливаться как на подводных лодках, так и на надводных кораблях.
Наиб. эффективны стационарные пассивные системы, в виде протяжённых антенн,
содержащих большое кол-во гидрофонов; данные от этих антенн по кабелю
передаются на береговые станции обработки. Пассивные системы используются также
в гидроакустич. радиобуях, к-рые, как правило, сбрасываются с самолётов-разведчиков
и с помощью приёмной радиоаппаратуры, находящейся на этих самолётах, позволяют
быстро оценить гидроакустич. обстановку в данном районе. Определение направления
на шумящий объект пассивным методом используется и в самонаводящихся торпедах.
При активной Г. используется
отражённый или рассеянный объектом сигнал, поэтому в активной локации создаётся
мощное направленное излучение импульсов акустических с заполнением несущей
частотой. При этом направление на объект определяется аналогично пассивному
методу, а расстояние R до объекта по времени t, прошедшему от
излучения импульса до прихода эхо-сигнала:  , где с - скорость звука в воде. Наряду с разрешающей способностью по
расстоянию, осн. характеристикой гидролокаторов является дальность обнаружения,
зависящая от мощности излучаемого звука, уровня акустич. помех и условий распространения
звука в водной среде. Выбор частоты заполнения зависит от назначения гидролокатора.
Для дальнего обнаружения на расстояниях в десятки км и более используют НЧ порядка
единиц кГц, к-рые слабо поглощаются в морской воде; однако при этом необходимо
применение приёмно-излучающих антенн очень больших размеров. Высокочастотные
гидролокаторы более компактны, однако дальность их действия не превышает неск.
км. Напр., для рыбопоиска используют обычно частоты от десятков до сотен кГц.
Длительность импульсов t также меняется в широких пределах; она определяет разрешающую
способность по расстоянию
, где с - скорость звука в воде. Наряду с разрешающей способностью по
расстоянию, осн. характеристикой гидролокаторов является дальность обнаружения,
зависящая от мощности излучаемого звука, уровня акустич. помех и условий распространения
звука в водной среде. Выбор частоты заполнения зависит от назначения гидролокатора.
Для дальнего обнаружения на расстояниях в десятки км и более используют НЧ порядка
единиц кГц, к-рые слабо поглощаются в морской воде; однако при этом необходимо
применение приёмно-излучающих антенн очень больших размеров. Высокочастотные
гидролокаторы более компактны, однако дальность их действия не превышает неск.
км. Напр., для рыбопоиска используют обычно частоты от десятков до сотен кГц.
Длительность импульсов t также меняется в широких пределах; она определяет разрешающую
способность по расстоянию  .
Иногда применяется квазинепрерывный сигнал с частотномодулир. заполнением для
определения расстояния; используются и др. более сложные сигналы, напр. шумовые
с последующей корреляц. обработкой. Осн. помехами в активной Г. являются собств.
шумы океана и реверберация, обусловленная рассеянием
звука поверхностью дном и толщей воды. Для выделения сигнала на фоне помех используют
разл. методы, в частности метод накопления, основанный на том, что сигнал, отражённый
от объекта, складывается по давлению, как регулярный, а шумовой - по интенсивности.
Увеличение мощности излучения улучшает отношение сигнал/шум, однако реверберац.
помеха при этом не меняется, её можно уменьшить, укорачивая длительность посылки
или сужая диаграмму направленности системы, но в последнем случае увеличивается
время, необходимое на просмотр сигналов с разл. направлений.
.
Иногда применяется квазинепрерывный сигнал с частотномодулир. заполнением для
определения расстояния; используются и др. более сложные сигналы, напр. шумовые
с последующей корреляц. обработкой. Осн. помехами в активной Г. являются собств.
шумы океана и реверберация, обусловленная рассеянием
звука поверхностью дном и толщей воды. Для выделения сигнала на фоне помех используют
разл. методы, в частности метод накопления, основанный на том, что сигнал, отражённый
от объекта, складывается по давлению, как регулярный, а шумовой - по интенсивности.
Увеличение мощности излучения улучшает отношение сигнал/шум, однако реверберац.
помеха при этом не меняется, её можно уменьшить, укорачивая длительность посылки
или сужая диаграмму направленности системы, но в последнем случае увеличивается
время, необходимое на просмотр сигналов с разл. направлений.
Дальность действия гидролокаторов
часто ограничивается неблагоприятными условиями распространения звука (см. Гидроакустика). В зависимости от типа систем, условий распространения, характеристик лоцируемого
объекта дальность действия гидролокаторов меняется от неск. сотен м до неск.
сотен км.

Ю. Ю. Житковский
1. Электромагнитная волна (в религиозной терминологии релятивизма - "свет") имеет строго постоянную скорость 300 тыс.км/с, абсурдно не отсчитываемую ни от чего. Реально ЭМ-волны имеют разную скорость в веществе (например, ~200 тыс км/с в стекле и ~3 млн. км/с в поверхностных слоях металлов, разную скорость в эфире (см. статью "Температура эфира и красные смещения"), разную скорость для разных частот (см. статью "О скорости ЭМ-волн")
2. В релятивизме "свет" есть мифическое явление само по себе, а не физическая волна, являющаяся волнением определенной физической среды. Релятивистский "свет" - это волнение ничего в ничем. У него нет среды-носителя колебаний.
3. В релятивизме возможны манипуляции со временем (замедление), поэтому там нарушаются основополагающие для любой науки принцип причинности и принцип строгой логичности. В релятивизме при скорости света время останавливается (поэтому в нем абсурдно говорить о частоте фотона). В релятивизме возможны такие насилия над разумом, как утверждение о взаимном превышении возраста близнецов, движущихся с субсветовой скоростью, и прочие издевательства над логикой, присущие любой религии.
4. В гравитационном релятивизме (ОТО) вопреки наблюдаемым фактам утверждается об угловом отклонении ЭМ-волн в пустом пространстве под действием гравитации. Однако астрономам известно, что свет от затменных двойных звезд не подвержен такому отклонению, а те "подтверждающие теорию Эйнштейна факты", которые якобы наблюдались А. Эддингтоном в 1919 году в отношении Солнца, являются фальсификацией. Подробнее читайте в FAQ по эфирной физике.
|
|
