Гироскоп (от греч. gyreuо - кружусь, вращаюсь и skopeo - смотрю, наблюдаю) - быстровращающееся
симметричное твёрдое тело, ось вращения (ось симметрии) к-рого может изменять
своё направление в пространстве. Свойствами Г. обладают вращающиеся небесные
тела, артиллерийские снаряды, роторы турбин, устанавливаемых на судах, винты
самолётов и т. п. В совр. технике Г.- осн. элемент всевозможных гироскопич.
устройств или приборов, широко применяемых для автоматич. управления движением
самолётов, судов, торпед, ракет и в ряде др. систем гироскопич. стабилизации,
для целей навигации (указатели курса, поворота, горизонта, стран света и др.),
для измерения угловых или поступат. скоростей движущихся объектов (напр., ракет)
и во мн. др. случаях (напр., при прохождении стволов штолен, строительстве метрополитенов,
при бурении скважин).
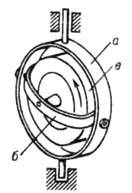
Чтобы ось Г. могла свободно
поворачиваться в пространстве, Г. обычно закрепляют в кольцах т. н. карданова
подвеса (рис. 1), в к-ром оси внутр. и внеш. колец и ось Г. пересекаются в одной
точке, наз. центром подвеса. Закреплённый в таком подвесе Г. имеет 3 степени
свободы и может совершать любой поворот около центра подвеса. Если центр тяжести
Г. совпадает с центром подвеса, Г. наз. уравновешенным, или астатическим. Изучение
законов движения Г.- задача динамики твёрдого тела.
Рис. 1. Классический карданов
подвес, а - внешнее кольцо, б - внутреннее кольцо, в - ротор.
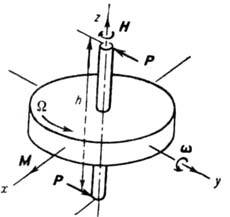
Рис. 2. Прецессия гироскопа.
Угловая скорость прецессии  направлена так, что вектор собственного кинетического момента Н
стремится к совмещению с вектором момента М пары, действующей
на гироскоп.
направлена так, что вектор собственного кинетического момента Н
стремится к совмещению с вектором момента М пары, действующей
на гироскоп.
Основные свойства гироскопа.
Если к оси быстровращающегося свободного Г. приложить пару сил (P - F)с
моментом  (h - плечо силы) (рис. 2), то (против ожидания) Г. начнёт дополнительно поворачиваться
не вокруг оси х, перпендикулярной к плоскости пары, а вокруг оси у, лежащей в этой плоскости и перпендикулярной к собств. оси тела z. Это дополнит.
движение наз. прецессией. Прецессия Г. будет происходить по отношению к инерциалъной
системе отсчета (к осям, направленным на неподвижные звёзды) с угловой скоростью
(h - плечо силы) (рис. 2), то (против ожидания) Г. начнёт дополнительно поворачиваться
не вокруг оси х, перпендикулярной к плоскости пары, а вокруг оси у, лежащей в этой плоскости и перпендикулярной к собств. оси тела z. Это дополнит.
движение наз. прецессией. Прецессия Г. будет происходить по отношению к инерциалъной
системе отсчета (к осям, направленным на неподвижные звёзды) с угловой скоростью

где I - момент
инерции Г. относительно оси z,  -
угловая скорость собств. вращения Г. относительно той же оси. Величина
-
угловая скорость собств. вращения Г. относительно той же оси. Величина  наз. собственным кинетическим моментом (или моментом количества движения)Г. Направление
наз. собственным кинетическим моментом (или моментом количества движения)Г. Направление  определяется так, как показано на рис. 2. Из ф-лы (1) ясно, что прецессия происходит
тем медленнее, чем больше
определяется так, как показано на рис. 2. Из ф-лы (1) ясно, что прецессия происходит
тем медленнее, чем больше  ;
на практике величина
;
на практике величина бывает
в миллионы раз меньше
бывает
в миллионы раз меньше  .
.

Рис. 3. Конус нутаций.
При более подробном рассмотрении
оказывается, что собств. вращение и прецессия симметричного Г. могут сопровождаться
т. н. нутациями - быстрыми конич. движениями оси Г. относительно изменяющегося
по закону (1) направления (рис. 3). Угол конуса нутации  ,
как правило, бывает очень мал. Кроме того, из-за наличия неизбежных сопротивлений
нутации обычно быстро затухают. Всё это позволяет при решении большинства технич.
задач учитывать только прецессию Г., что и приводит к т. н. элементарной, или
прецессионной, теории гироскопич. явлений, осн. соотношением к-рой является
ф-ла (1). В более общем случае, когда угол а между осями собств. вращения и
прецессии оказывается не равным 90°, эта ф-ла принимает вид
,
как правило, бывает очень мал. Кроме того, из-за наличия неизбежных сопротивлений
нутации обычно быстро затухают. Всё это позволяет при решении большинства технич.
задач учитывать только прецессию Г., что и приводит к т. н. элементарной, или
прецессионной, теории гироскопич. явлений, осн. соотношением к-рой является
ф-ла (1). В более общем случае, когда угол а между осями собств. вращения и
прецессии оказывается не равным 90°, эта ф-ла принимает вид

При изучении поведения
Г. по отношению к подвижному основанию в выражение для M должны
входить и моменты сил инерции переносного движения.
Из ф-лы (1) следует, что
если Г. будет полностью свободен от постоянно действующих на него сил, т. е.
при M=0, ось Г. будет сохранять неизменное направление по отношению к
неподвижным звёздам, т. к. тогда  =0. Кратковрем. воздействие на ось такого Г. пары сил с моментом
=0. Кратковрем. воздействие на ось такого Г. пары сил с моментом  вызовет смещение оси на малый угол, тем меньший, чем меньше
вызовет смещение оси на малый угол, тем меньший, чем меньше  ,
т. е. чем больше будет
,
т. е. чем больше будет  . С прекращением же этого воздействия будет опять M=0, а следовательно, и
. С прекращением же этого воздействия будет опять M=0, а следовательно, и  =0,
так что смещение оси прекратится. Т.о., ось быстровращающегося свободного Г.
практически не изменяет своего направления под влиянием кратковрем. внеш. возмущений
(толчков) и в этом смысле устойчива. Важным свойством свободного Г. устойчиво
сохранять направление своей оси пользуются в устройствах, применяемых для автоматич.
управления движением самолётов, ракет и т. п., а также в ряде навигац. и др.
приборов.
=0,
так что смещение оси прекратится. Т.о., ось быстровращающегося свободного Г.
практически не изменяет своего направления под влиянием кратковрем. внеш. возмущений
(толчков) и в этом смысле устойчива. Важным свойством свободного Г. устойчиво
сохранять направление своей оси пользуются в устройствах, применяемых для автоматич.
управления движением самолётов, ракет и т. п., а также в ряде навигац. и др.
приборов.
Г., ось к-рого закреплена
подшипниками a, a1 в кольце с неподвижной осью вращения bb1
(рис. 4), обладает двумя степенями свободы. Если это кольцо вращать вокруг оси
bb1 с угловой скоростью  ,
то Г. будет совершать вынужденную прецессию. При этом со стороны Г. на подшипники
a, а1 действует пара сил (Q, Q1), стремящаяся
совместить ось собств. вращения aа1 с осью прецессии bb1
так, чтобы направления векторов
,
то Г. будет совершать вынужденную прецессию. При этом со стороны Г. на подшипники
a, а1 действует пара сил (Q, Q1), стремящаяся
совместить ось собств. вращения aа1 с осью прецессии bb1
так, чтобы направления векторов  и
и  совпали (правило
H. E. Жуковского). Момент этой гироскопич. пары
совпали (правило
H. E. Жуковского). Момент этой гироскопич. пары

где -
угол между осями аa1 и bb1. Подобный гироскопич.
эффект имеет место у роторов турбин, установленных на судах, при повороте судов
или при качке, у винтовых самолётов при виражах и т. п. Ф-ла (3) позволяет определить
возникающие при этом гироскопич. давления на подшипники.
-
угол между осями аa1 и bb1. Подобный гироскопич.
эффект имеет место у роторов турбин, установленных на судах, при повороте судов
или при качке, у винтовых самолётов при виражах и т. п. Ф-ла (3) позволяет определить
возникающие при этом гироскопич. давления на подшипники.
На гироскопич. эффекте
основан принцип т. н. силовой гироскопич. стабилизации (см. ниже), а также устройство
ряда приборов, напр. гироскопич. указателя поворотов и др.
Уравнения движения гироскопа.
Движение большинства гироскопич. систем таково, что если исключить кратковрем.
переходные процессы, возникающие при ударах или при резких изменениях сил, действующих
на систему, изменение ориентации осей роторов Г. относительно направлений на
неподвижные звёзды происходит весьма медленно. При изучении такого прецессионного
движения достаточно пользоваться элементарной теорией Г.
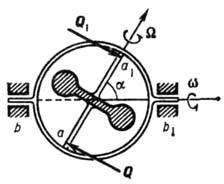
Рис. 4. Гироскоп с двумя
степенями свободы.
Исследование процессов,
в течение к-рых оси роторов Г. совершают нутации, и решение вопросов устойчивости
гироскопич. систем требуют учёта кинетич. моментов всех тел, входящих в состав
гироскопич. системы. Соответствующие ур-ния движения являются ур-ниями нутац.
теории Г. Дифференц. ур-ния нутац. теории имеют для данной гироскопич. системы
более высокий порядок, чем ур-ния прецессионного движения. Однако решение задач
нутац. теории упрощается тем обстоятельством, что во мн. случаях можно ограничиться
рассмотрением малых движений методами теории малых колебаний.
Строго ур-ния движения
Г. справедливы по отношению к инерциальной системе отсчёта, однако на практике
движение гироскопич. систем приходится изучать по отношению к осям, связанным
с тем подвижным объектом (судно, самолёт, ракета, Земля и др.), на к-ром эти
системы установлены. Поэтому при составлении ур-ний в число действующих сил
надлежит включать также переносные и Кориолиса силы, инерции, обусловленные
перемещением объекта. Оказывается, что удобнее всего составлять ур-ния движения
Г. по отношению к системе координат  с началом в центре 0 подвеса гироскопич. системы и с осями, не изменяющими
своей ориентации относительно направлений на неподвижные звёзды, т. е. перемещающимися
по отношению к инерциальной системе отсчёта поступательно. В этом случае кориолисовы
силы инерции вообще отсутствуют, а все силы инерции переносного движения антипараллельны
ускорению центра 0 в его движении относительно инерциальной системы отсчёта.
с началом в центре 0 подвеса гироскопич. системы и с осями, не изменяющими
своей ориентации относительно направлений на неподвижные звёзды, т. е. перемещающимися
по отношению к инерциальной системе отсчёта поступательно. В этом случае кориолисовы
силы инерции вообще отсутствуют, а все силы инерции переносного движения антипараллельны
ускорению центра 0 в его движении относительно инерциальной системы отсчёта.
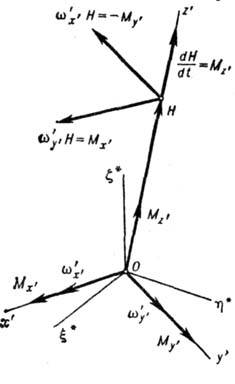
Рис. 5. Приложение теоремы механики системы о кинетическом моменте к установлению уравнения прецессионного движения ротора гироскопа. Скорость конца вектора собственного кинетического момента принимается геометрически равной главному моменту совокупности сил, приложенных к ротору.
В теории Г. с достаточным
для практики приближением можно за инерциальную систему отсчёта принять невращающуюся
систему координат с началом в центре Земли. Точно так же малая погрешность при
подсчёте сил инерции переносного движения происходит, если за ускорение центра
0 подвижной невращающейся системы координат  принять его ускорение относительно земной поверхности. В этом случае вместо
действующих на массы частей гироскопич. системы сил тяготения к Земле следует
брать силы тяжести. Для составления
ур-ний движения Г. введём ещё систему осей 0x'y'z' с началом в той же
точке 0, что и у системы 0
принять его ускорение относительно земной поверхности. В этом случае вместо
действующих на массы частей гироскопич. системы сил тяготения к Земле следует
брать силы тяжести. Для составления
ур-ний движения Г. введём ещё систему осей 0x'y'z' с началом в той же
точке 0, что и у системы 0  (точка
0 лежит где-то на оси симметрии ротора, напр. в центре его подвеса).
Ось z' системы совпадает с осью симметрии ротора, но сама система Ox'y'z' не вращается вместе с ротором, будучи связанной, напр., с кожухом Г. Тогда
ур-ния прецессионного
движения ротора, симметричного Г. относительно осей
(точка
0 лежит где-то на оси симметрии ротора, напр. в центре его подвеса).
Ось z' системы совпадает с осью симметрии ротора, но сама система Ox'y'z' не вращается вместе с ротором, будучи связанной, напр., с кожухом Г. Тогда
ур-ния прецессионного
движения ротора, симметричного Г. относительно осей  , записанные в проекциях на оси Ox'y'z', имеют вид
, записанные в проекциях на оси Ox'y'z', имеют вид
Они выражают (рис. 5) равенство
(по числ. величине и направлению) скорости конца вектора собственного кинетич.
момента  и гл.
момента
и гл.
момента  относительно
центра 0 сил, приложенных к ротору. В число этих сил должны быть включены
переносные силы инерции, обусловленные поступат. движением системы отсчёта О
относительно
центра 0 сил, приложенных к ротору. В число этих сил должны быть включены
переносные силы инерции, обусловленные поступат. движением системы отсчёта О  . Величины
. Величины
 и
и  - проекции на оси х' и у' угловой скорости системы координат Ox'y'z' относительно системы
- проекции на оси х' и у' угловой скорости системы координат Ox'y'z' относительно системы  ,
т. е. относительно направлений на неподвижные звёзды. Угловую скорость ротора
относительно осей Ox'y'z' можно наз. угловой скоростью его собств. вращения.
Вектор Н направлен по оси собств. вращения (рис. 6} ротора z',
а его модуль можно принять равным
,
т. е. относительно направлений на неподвижные звёзды. Угловую скорость ротора
относительно осей Ox'y'z' можно наз. угловой скоростью его собств. вращения.
Вектор Н направлен по оси собств. вращения (рис. 6} ротора z',
а его модуль можно принять равным

где С - момент инерции
ротора относительно его оси симметрии z' (полярный момент инерции),  -
угол поворота ротора относительно системы координат x'y'z'. Принимается также, что значительно превышает величину
-
угол поворота ротора относительно системы координат x'y'z'. Принимается также, что значительно превышает величину  - проекцию
- проекцию  угловой
скорости системы координат на её же ось (на практике на 3-4 порядка). В большинстве
случаев Н можно считать постоянным, т. к. обычно моменты сил, вращающих
ротор, и моменты сопротивления этому вращению взаимно уравновешиваются. Соответственно,
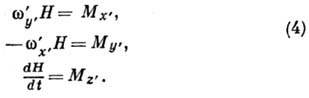
в 3-м из ур-ний (4) следует положить Мz'=0.
угловой
скорости системы координат на её же ось (на практике на 3-4 порядка). В большинстве
случаев Н можно считать постоянным, т. к. обычно моменты сил, вращающих
ротор, и моменты сопротивления этому вращению взаимно уравновешиваются. Соответственно,
в 3-м из ур-ний (4) следует положить Мz'=0.
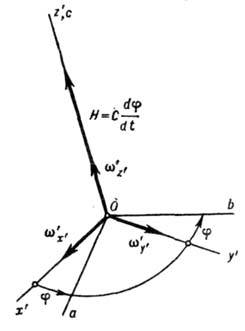
Рис. 6. Вектор собственного
кинетического момента гироскопа. Система координат аbс связана с ротором гироскопа;
она вращается относительно системы x'y'z' с угловой скоростью  вокруг оси z', совпадающей с осью с. Момент инерции ротора относительно оси
с (оси симметрии или оси собственного вращения) обозначен через С.
вокруг оси z', совпадающей с осью с. Момент инерции ротора относительно оси
с (оси симметрии или оси собственного вращения) обозначен через С.
Более строгими ур-ниями
движения ротора являются ур-ния, соответствующие нутац. теории Г., а именно:
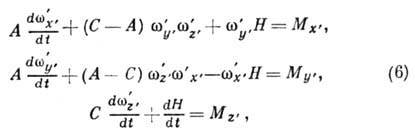
где А - момент инерции
ротора относительно к--л. оси, перпендикулярной его оси симметрии и проходящей
через центр О (экваториальный момент инерции). В ур-ниях (6), в отличие
от ур-ний (4), принято, что система координат x'y'z' может иметь угловую
скорость с произвольной составляющей  вдоль оси симметрии ротора z'. B частности, эту систему можно связать с
самим ротором. Тогда
ур-ния обращаются в общеизвестные ур-ния Эйлера движения твёрдого осесимметричного
тела (см. Эйлера динамические уравнения), осложнённые наличием в правых
частях упоминавшихся выше переносных сил инерции.
вдоль оси симметрии ротора z'. B частности, эту систему можно связать с
самим ротором. Тогда
ур-ния обращаются в общеизвестные ур-ния Эйлера движения твёрдого осесимметричного
тела (см. Эйлера динамические уравнения), осложнённые наличием в правых
частях упоминавшихся выше переносных сил инерции.
Ур-ния (4) и (6) пригодны
для изучения движения ротора Г., не стеснённого кардановым подвесом, напр. в
случае шарового Г. (см. ниже), и вообще свободных тел (снаряд, небесные тела,
искусств. спутники, космич. корабли). При наличии же карданова подвеса в состав
сил, образующих моменты относительно осей х' и у', т. е. в выражения
для Мх' и My' , войдут неизвестные силы
- нормальные реакции подшипников оси ротора. Для исключения этих сил, представляющих
воздействие внутр.
кольца подвеса (кожуха) на ротор, следует совместно с ур-ниями движения ротора
рассматривать также и ур-ния движения элементов подвеса Г.
При составлении ур-ний
прецессионного движения Г. в кардановом подвесе изменение кинетич. моментов
элементов подвеса не учитывается. Поэтому совокупность сил, приложенных, напр.,
к внутр. кольцу подвеса (кожуху), следует считать статически эквивалентной нулю
(уравновешенной). T. о., вместо ур-ний движения внутр. кольца фактически составляются
ур-ния равновесия всех приложенных к нему сил, т. е. сил взаимодействия с внеш.
кольцом, ротором Г. и его основанием, сторонних (внеш.) сил и сил инерции переносного
движения. То же относится и к силам, приложенным к внеш. кольцу карданова подвеса.
После исключения нормальных
реакций осей подвеса ур-ния прецессионного движения Г. в кардановом подвесе
приводятся к виду
Здесь тх' ,
тy' , mz' - суммы моментов относительно осей х',
у', z' соответственно всех сторонних сил и сил инерции переносного движения,
действующих на ротор; Iх' ,Iy' ,Iz' - аналогичные
суммы, относящиеся к внутр. кольцу подвеса (кожуху); M - сумма моментов
относительно оси z' сил, действующих на ротор со стороны внутр. кольца (кожуха),
т. е. сил, вращающих ротор, и сил сопротивления этому вращению (сил трения);
L - сумма моментов относительно оси у' (или  )
кожуха (рис. 7) сил воздействия внеш. кольца карданова подвеса на внутр. кольцо
(кожух); К - сумма моментов относительно оси
)
кожуха (рис. 7) сил воздействия внеш. кольца карданова подвеса на внутр. кольцо
(кожух); К - сумма моментов относительно оси  (или
(или  ) внеш. кольца
сил воздействия основания Г. на это кольцо; k - аналогичная сумма моментов
сторонних сил, действующих на внеш. кольцо;
) внеш. кольца
сил воздействия основания Г. на это кольцо; k - аналогичная сумма моментов
сторонних сил, действующих на внеш. кольцо;  - угол поворота внутр. кольца (кожуха) относительно внешнего. Он принимается
положительным, если система координат x'y'z', связанная с внутр. кольцом
(кожухом), повёрнута относительно системы координат
- угол поворота внутр. кольца (кожуха) относительно внешнего. Он принимается
положительным, если система координат x'y'z', связанная с внутр. кольцом
(кожухом), повёрнута относительно системы координат  , связанной с внешним кольцом подвеса, против хода часовой стрелки (наблюдение
за поворотом производится со стороны положит. части оси у' или
, связанной с внешним кольцом подвеса, против хода часовой стрелки (наблюдение
за поворотом производится со стороны положит. части оси у' или  ).
При
).
При =0 оси этих
систем соответственно совпадают.
=0 оси этих
систем соответственно совпадают.
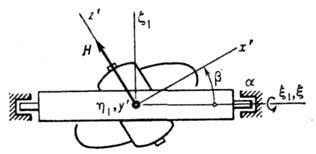
Рис. 7. Схема гироскопа
в кардановом подвесе. Система координат x'y'z' связана с внутренним кольцом
подвеса, система  -с внешним, а
-с внешним, а  -с основанием гироскопа (на рис. показана лишь ось
-с основанием гироскопа (на рис. показана лишь ось  ).
).
Для определения величин
 , следует знать
угловые скорости: основания Г. относительно системы координат
, следует знать
угловые скорости: основания Г. относительно системы координат  ,
внеш. кольца карданова подвеса по отношению к основанию и внутр. кольца по отношению
к внешнему. Имеют место след. ф-лы:
,
внеш. кольца карданова подвеса по отношению к основанию и внутр. кольца по отношению
к внешнему. Имеют место след. ф-лы:
где  - проекции угловой скорости основания Г.
на оси, связанной с основанием системы координат
- проекции угловой скорости основания Г.
на оси, связанной с основанием системы координат  . Ось
. Ось этой системы
совпадает с осью внеш. кольца подвеса. Угол поворота внеш. кольца относительно
основания обозначен через
этой системы
совпадает с осью внеш. кольца подвеса. Угол поворота внеш. кольца относительно
основания обозначен через  (рис. 8). При
(рис. 8). При  =0
оси систем координат
=0
оси систем координат  соответственно совпадают. Положит. направление отсчёта угла
соответственно совпадают. Положит. направление отсчёта угла  такое же, как и угла
такое же, как и угла .
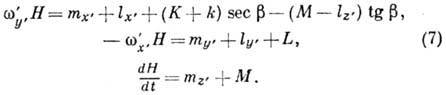
Ур-ния (7) и (8) позволяют решать большинство вопросов, связанных с одногироскопными
гироскопическими системами в рамках прецессионной теории гироскопа.
.
Ур-ния (7) и (8) позволяют решать большинство вопросов, связанных с одногироскопными
гироскопическими системами в рамках прецессионной теории гироскопа.

Рис. 8. К подсчёту абсолютной
угловой скорости внутреннего кольца карданова подвеса (система координат x'y'z'). Вектор  -
относительная угловая скорость внешнего кольца
-
относительная угловая скорость внешнего кольца  относительно основания
относительно основания  ,
,  - угловая скорость
внутреннего кольца относительно внешнего.
- угловая скорость
внутреннего кольца относительно внешнего.
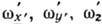
Рис. 9. Полюс гироскопа
(точка P) и связь составляющих его скорости vx и vy относительно невращающейся системы координат (на рис не показана) с суммами Mx и My моментов
сил, действующих на
ротор гироскопа и его внутреннее кольцо (кожух).
(на рис не показана) с суммами Mx и My моментов
сил, действующих на
ротор гироскопа и его внутреннее кольцо (кожух).
В случае, когда можно пренебречь
моментами трения К и L в осях подвеса и считать равными нулю моменты
k, тz , lz и М, ур-ния прецессионной
теории Г. в кардановом подвесе значительно упрощаются и допускают следующую
геометрич. интерпретацию. Вводится вспомогат. система координат xyz с
началом в центре подвеса Г. (рис. 9). На расстоянии, равном единице от начала
координат, строится плоскость, параллельная координатной плоскости ху. Через
х и у обозначаются координаты точки P пересечения вектора
H с упомянутой плоскостью (полюс Г.). Тогда ур-ния прецессионного движения
Г. можно представить в виде:
где vx и
vy - проекции на оси х и у скорости точки P в её движении по отношению к системе координат
 . Модуль H в данном случае - пост. величина. Предполагается, что направление
H мало отклоняется от направления оси z, в результате чего координаты
х и у точки P малы по сравнению с единицей и с большой
точностью равны углам отклонения от координатных плоскостей yz и xz вектора H или, что то же, оси собств. вращения гироскопа z.
. Модуль H в данном случае - пост. величина. Предполагается, что направление
H мало отклоняется от направления оси z, в результате чего координаты
х и у точки P малы по сравнению с единицей и с большой
точностью равны углам отклонения от координатных плоскостей yz и xz вектора H или, что то же, оси собств. вращения гироскопа z.
Величины Mх и Mу, к-рые находятся в правых частях ур-ний (9), представляют
собой суммы моментов относительно осей х и у сторонних сил и переносных
сил инерции, действующих на механич. систему: ротор - внутр. кольцо (кожух)
Г.
Если обозначить через  проекции на оси х, у, z угловой скорости системы координат х у z относительно
невращающейся системы
проекции на оси х, у, z угловой скорости системы координат х у z относительно
невращающейся системы  , то ур-ния (9) можно представить в виде
, то ур-ния (9) можно представить в виде
Полученные ур-ния удобны
для исследования поведения однороторного гирокомпаса, гироскопич. маятника (гировертикали)
при смещениях основания, на к-ром они расположены. В первом случае ось z направляется
на север, а во втором - вертикально.
Ур-ния движения Г. в кардановом
подвесе, соответствующие нутац. теории, можно также вывести, пользуясь Лагранжа
уравнениями 2-го рода. При этом следует рассматривать движение механич.
системы, состоящей из ротора и элементов подвеса Г. по отношению к невращающейся
системе координат  с началом в центре карданова подвеса, и принять углы
с началом в центре карданова подвеса, и принять углы  за обобщённые координаты упомянутой механич. системы. Составив ур-ния для её
кинетич. энергии, с помощью ур-ний Лагранжа 2-го рода можно получить ур-ния
движения, позволяющие изучать поведение Г. в разл. гироскопич. устройствах.
за обобщённые координаты упомянутой механич. системы. Составив ур-ния для её
кинетич. энергии, с помощью ур-ний Лагранжа 2-го рода можно получить ур-ния
движения, позволяющие изучать поведение Г. в разл. гироскопич. устройствах.
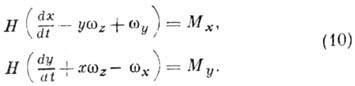
Устойчивость гироскопа.
Г. с тремя степенями свободы, находящийся под длит. воздействием сил, устойчив
не всегда. Напр., вертикальный ("спящий") волчок, испытывающий воздействие
силы тяжести (рис. 10), устойчив только при выполнении условия

где P - вес Г.,
а - расстояние его центра тяжести от точки опоры О, А - момент
инерции Г. относительно оси Ox. При невыполнении этого условия ось Г.
будет удаляться от вертикали, совершая петлеобразные движения. Аналогичное условие
имеет место и для устойчивости прецессионного движения Г. Напр., устойчивость
при движении в воздухе вращающегося артиллерийского снаряда приближённо определяется
ф-лой H. В. Маиевского, к-рая совпадает с (11), если в ней под P понимать
силу сопротивления воздуха, а под а - расстояние от центра масс С до точки О пересечения линии действия силы P с осью снаряда
(рис. 11). Г. с двумя степенями свободы (рис. 4) всегда неустойчив; при толчке,
дающем момент относительно оси bb1, такой Г. начнёт вращаться
вместе с кольцом вокруг этой оси.
Гироскопы в технике.
Применяемые в технике Г. представляют собой тела вращения (роторы), имеющие
обычно форму маховика с утолщенным ободом или шара массой от неск. г до десятков
кг. Быстрое вращение Г. (со скоростью до 60 000 об/мин и более) обычно достигается
тем, что ротор Г. делают вращающейся частью (ротором) быстроходного электродвигателя
пост. или переменного тока. Иногда вращение Г. поддерживается струёй воздуха
- ротор Г. является одновременно ротором возд турбинки. К основанию прибора
(устройства) Г. крепится с помощью той или иной системы подвеса. Наиболее употребителен
карданов подвес с ротором, заключенным в кожух. Для уменьшения сопротивления
вращению в ряде случаев кожух делается герметичным и заполняется водородом.
Это способствует также предотвращению коррозии металлич. частей и окисления
смазки. В нек-рых приборах кожух, заключающий в себе ротор Г., погружают в жидкость.
Подшипники кожуха (поплавка) при этом почти полностью разгружаются и момент
трения скольжения в них уменьшается до стотысячных долей. H*см. Применяются
также проволочные (торсионные) подвесы и подвесы на возд. плёнке, напр. у т.н.
шара-гироскопа (рис. 12).
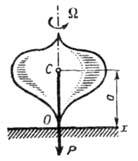
Рис. 10. "Спящий"
волчок.
Рис. U. К устойчивости
вращающегося снаряда.
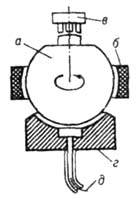
Рис. 12. Шар-гироскоп
Сперри на воздушном подвесе, а-стальной ротор, б-статор, создающий
вращающее магнитное поле; в - датчик, посредством сигналов к-рого производится
"слежение" за осью шара на качающемся основании (корабле); г - бронзовая чаша, отделённая от шара воздушным слоем толщиной порядка сотых
долей мм, д - подача сжатого воздуха для поддержки шарагироскопа.
Важным элементом мн. гироскопич.
приборов является уравновешенный Г. с тремя степенями свободы. Для повышения
точности прибора требуется максимально уменьшать величину момента M, возникающего
вследствие трения в осях подвеса и несовпадения центра тяжести ротора с центром
подвеса, т. к., согласно ф-ле (1), этот момент вызывает прецессию (уход) оси
ротора. Момент трения в подвесах точных (прецизионных) Г. обычно уменьшают применением
высококачеств. шариковых подшипников. Вследствие вибраций подвеса или возвратно-вращат.
движений внеш. обоймы шарикоподшипников момент трения в ряде случаев удаётся
сделать значительно меньше момента силы тяжести. Уменьшение момента силы тяжести
достигается соответствующей балансировкой Г. Требуемая при этом точность совмещения
центра масс Г. с геом. центром подвеса очень велика. Так, для Г. ср. размеров
массой ок. 1 кг, имеющего угловую скорость вращения ротора порядка 30 000 об/мин,
смещение центра масс от осп подвеса на 1 мк вызывает прецессию со скоростью
ок. 1 град/ч. Земля вращается со значительно большей угловой скоростью - 15
град/час. Следовательно, подобным Г. можно легко обнаружить факт вращения Земли.
Однако для решения ряда технич. вопросов, напр. навигации судов и ракет, требуется
еще более высокая точность балансировки, т. к. скорость ухода оси Г. относительно
неподвижных звёзд порядка 1 град/ч оказывается чрезмерно большой. Улучшая балансировку
и уменьшая трение в осях, а также увеличивая кинетич. момент H, удаётся
в соответствии с ф-лой (1) достичь медленного ухода оси и обеспечить тем самым
необходимую точность работы разл. гироскопич. приборов, в частности приборов
управления движением баллистич. ракет и систем инерциальной навигации.
В обычных Г. имеются два
разл. вида подшипников: подшипники, в к-рых совершает быстрое вращение ротор,
и подшипники подвеса. Подшипники оси собств. вращения ротора должны обладать
достаточной жёсткостью, высокой долговечностью при работе на больших скоростях
вращения. Подшипники же подвеса работают при малых угловых скоростях и осн.
требование к ним - иметь возможно меньшее трение.
Среди современных типов
Г., в к-рых проблема опор решается иначе, чем в классич. схеме "ротор
в кардановом подвесе", следует упомянуть т. н. динамически настраиваемый
Г. В нём быстровращающийся ротор посредством упругих связей и промежуточных
инерц. элементов крепится к валу. Спец. подбором параметров (условие динамич.
настройки) добиваются равенства нулю (в среднем) моментов, вызывающих прецессию
оси ротора в пределах малых углов её отклонения от оси вала ротора. В результате
ось ротора практически оказывается неподвижной в инерциальном пространстве.
Преимуществом этих Г. является отсутствие специфич. моментов трения в подшипниках
подвеса, а также возможность увеличения кинетич. момента ротора при неизменных
габаритах прибора.
Стремление получить Г.
более высокой точности привело к созданию электростатич. и магн. подвесов. В
этих Г. быстровращающийся шар поддерживается электрич. или магн. полем в вакууме.
T. к. из камеры, в к-рой находится вращающееся тело, газ полностью выкачан,
то тело практически не испытывает трения и может вращаться по инерции в течение
неск. нед.
В случае электростатич.
подвеса поверхность шара выполняется из диэлектрика, и поддерживающее электрич.
поле индуцирует на нём электрич. заряды противоположного знака, в результате
чего всегда возникает притягивающая сила. Для подвешивания тел это свойство
непосредственно использовать нельзя, т. к., согласно Ирншоу теореме, статич.
равновесие тел, притягивающихся друг к другу по закону обратных квадратов, всегда
неустойчиво. Для создания устойчивого подвеса используют регулируемое поле.
То же самое имеет место и для магн. подвесов, когда ротор выполняется из ферромагнетика.
Если же ротор изготавливать из диамагн. материала, то подвес может быть устойчивым
и без дополнит. регулирования магн. поля (пассивный подвес). Эта схема подвеса
нашла применение в т. н. криогенном Г., в к-ром в условиях сверхнизких температур
материал шара - ниобий - переходит в сверхпроводящее состояние, при этом он
становится идеальным диамагнетиком. Внутрь такого материала магн. поле не проникает.
Само поле создаётся токами, циркулирующими в сверхпроводнике без потерь.
Перспективными датчиками
инерциальной информации являются лазерный Г. и волновой твердотельный Г., принцип
действия к-рых основан на инерционности образующихся в них стоячих волн - электромагнитных
в лазерном Г. и упругих в твердотельном. В лазерных Г. используют два луча света
от источника когерентного излучения, распространяющиеся в противоположных направлениях
по замкнутому кольцевому контуру. При вращении основания, на к-ром установлен
Г., между лучами возникает разность фаз, что позволяет обнаружить это вращение
и найти его угловую скорость или угол поворота.
Волновой твердотельный
Г. состоит из полого резонатора, к-рый представляет собой оболочку вращения
(сферическую, цилиндрическую и т. д.), системы возбуждения стоячих волн и системы
съёма информации о положении узлов и пучностей стоячих волн. При повороте основания
Г. на угол j стоячая волна поворачивается на угол kj, где 0<k<1
постоянная, зависящая от свойств материала, формы резонатора, а также числа
узлов и пучностей стоячей волны. Измеряя угол поворота стоячей волны, можно
вычислить угол поворота основания. См. также Квантовый гироскоп.
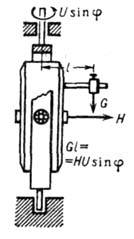
Рис 13. Гироскоп направления.
В ряде приборов
используется также свойство Г. равномерно прецессировать под действием постоянно
приложенных сил. Так, если посредством дополнит. груза вызвать прецессию Г.
с угловой скоростью, численно равной и противоположно направленной вертикальной
составляющей угловой скорости вращения Земли  (где U - угловая скорость Земли,
(где U - угловая скорость Земли,  - широта места), то ось такого Г. с той или иной степенью точности будет сохранять
неизменное направление относительно стран света. В течение неск. часов, пока
не накопится ошибка в 1-2°, такой Г., именуемый гироазимутом, или Г. направления
(рис. 13), может заменить компас (напр., на самолётах, в частности в полярной
авиации, где показания магн. компаса ненадёжны). Аналогичным Г., но со значительно
большим смещением центра тяжести от оси прецессии, можно определять поступат.
скорость объекта, движущегося в направлении оси bb1, с любым
ускорением
- широта места), то ось такого Г. с той или иной степенью точности будет сохранять
неизменное направление относительно стран света. В течение неск. часов, пока
не накопится ошибка в 1-2°, такой Г., именуемый гироазимутом, или Г. направления
(рис. 13), может заменить компас (напр., на самолётах, в частности в полярной
авиации, где показания магн. компаса ненадёжны). Аналогичным Г., но со значительно
большим смещением центра тяжести от оси прецессии, можно определять поступат.
скорость объекта, движущегося в направлении оси bb1, с любым
ускорением  (рис.
14). Если отвлечься от влияния силы тяжести, то можно считать, что на Г. действует
момент
(рис.
14). Если отвлечься от влияния силы тяжести, то можно считать, что на Г. действует
момент  переносной
силы инерции Q, где т - масса Г., l - плечо. Тогда, по
ф-ле (1), Г. будет прецессировать вокруг оси bb1 с угловой
скоростью
переносной
силы инерции Q, где т - масса Г., l - плечо. Тогда, по
ф-ле (1), Г. будет прецессировать вокруг оси bb1 с угловой
скоростью  . После
интегрирования последнего равенства получаем
. После
интегрирования последнего равенства получаем  , где
, где - нач. скорость
объекта. T. о., оказывается возможным определить скорость объекта v в
любой момент времени по углу
- нач. скорость
объекта. T. о., оказывается возможным определить скорость объекта v в
любой момент времени по углу  , на к-рый Г. повернётся к этому моменту вокруг оси bb1. Для
этого прибор должен быть снабжён счётчиком оборотов и устройством, вычитающим
из полного угла поворота угол, на к-рый Г. повернётся вследствие действия на
него момента силы тяжести. Таким прибором (интегратором продольных кажущихся
ускорений) определяют скорости вертик. взлёта ракеты; при этом ракета должна
быть стабилизирована так, чтобы она не имела вращения вокруг своей оси симметрии.
, на к-рый Г. повернётся к этому моменту вокруг оси bb1. Для
этого прибор должен быть снабжён счётчиком оборотов и устройством, вычитающим
из полного угла поворота угол, на к-рый Г. повернётся вследствие действия на
него момента силы тяжести. Таким прибором (интегратором продольных кажущихся
ускорений) определяют скорости вертик. взлёта ракеты; при этом ракета должна
быть стабилизирована так, чтобы она не имела вращения вокруг своей оси симметрии.
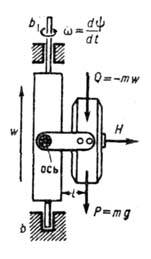
Рис. 14. Гироскопический
измеритель скорости подъема ракеты.  -
ускорение подъёма; g - ускорение свободного падения; P - сила тяжести,
Q - сила инерции,
-
ускорение подъёма; g - ускорение свободного падения; P - сила тяжести,
Q - сила инерции,  - собственный кинетический момент.
- собственный кинетический момент.
В ряде совр. конструкций
применяют т. н. поплавковый, или интегрирующий, Г. Ротор такого Г. помещён в
кожух - поплавок, погружённый в жидкость (рис. 15). При вращении поплавка вокруг
его оси х на Г. будет действовать момент Mx вязкого
трения, пропорциональный угловой скорости вращения  . Благодаря этому оказывается, что если Г. сообщить принудит. вращение вокруг
оси у, то угловая скорость этого вращения
. Благодаря этому оказывается, что если Г. сообщить принудит. вращение вокруг
оси у, то угловая скорость этого вращения  в соответствии с равенством (1) будет пропорциональна
в соответствии с равенством (1) будет пропорциональна  .
В результате угол поворота поплавка вокруг оси х будет, в свою очередь,
пропорционален интегралу по времени от
.
В результате угол поворота поплавка вокруг оси х будет, в свою очередь,
пропорционален интегралу по времени от  (поэтому Г. и наз. интегрирующим). Дополнит. электрич. и электромеханич. устройства
позволяют или измерять этим Г. угловую скорость, или сделать его элементом стабилизирующего
устройства. В первом случае спец. электромагнитами создаётся момент относительно
оси х, направленный против вращения поплавка; величина этого момента
регулируется так, чтобы поплавок остановился. Тогда момент M1 как бы заменит момент Mx сил вязкого трения и, следовательно,
по ф-ле (1), угловая скорость
(поэтому Г. и наз. интегрирующим). Дополнит. электрич. и электромеханич. устройства
позволяют или измерять этим Г. угловую скорость, или сделать его элементом стабилизирующего
устройства. В первом случае спец. электромагнитами создаётся момент относительно
оси х, направленный против вращения поплавка; величина этого момента
регулируется так, чтобы поплавок остановился. Тогда момент M1 как бы заменит момент Mx сил вязкого трения и, следовательно,
по ф-ле (1), угловая скорость  будет пропорциональна величине М1, определяемой по силе тока,
протекающего по обмоткам электромагнита. Во втором случае, при стабилизации,
напр., вокруг неподвижной оси у, корпус интегрирующего Г. размещается
на платформе, к-рую может вращать вокруг оси у спец. электродвигатель
(рис. 16). Для объяснения принципа стабилизации предположим, что основание,
на к-ром расположены подшипники платформы, само повернётся вокруг оси у на
нек-рый угол
будет пропорциональна величине М1, определяемой по силе тока,
протекающего по обмоткам электромагнита. Во втором случае, при стабилизации,
напр., вокруг неподвижной оси у, корпус интегрирующего Г. размещается
на платформе, к-рую может вращать вокруг оси у спец. электродвигатель
(рис. 16). Для объяснения принципа стабилизации предположим, что основание,
на к-ром расположены подшипники платформы, само повернётся вокруг оси у на
нек-рый угол  .
При неработающем двигателе платформа повернётся в
этом случае вместе с основанием на тот же угол
.
При неработающем двигателе платформа повернётся в
этом случае вместе с основанием на тот же угол  ,
а поплавок совершит поворот вокруг оси х на угол
,
а поплавок совершит поворот вокруг оси х на угол  ,
пропорциональный углу
,
пропорциональный углу  .
Если теперь двигатель будет вращать платформу в обратном направлении до тех
пор, пока поплавок не вернётся в исходное положение, то одновременно в исходное
положение вернётся и платформа. Можно непрерывно управлять двигателем так, чтобы
угол поворота поплавка сводился к нулю, тогда платформа окажется стабилизированной.
Сочетание двух поплавковых Г. в общем подвесе с аналогично управляемыми электродвигателями
приводит к стабилизации фиксированного направления, а трёх - к пространств.
стабилизации, используемой, в частности, в схемах инерциальной навигации.
.
Если теперь двигатель будет вращать платформу в обратном направлении до тех
пор, пока поплавок не вернётся в исходное положение, то одновременно в исходное
положение вернётся и платформа. Можно непрерывно управлять двигателем так, чтобы
угол поворота поплавка сводился к нулю, тогда платформа окажется стабилизированной.
Сочетание двух поплавковых Г. в общем подвесе с аналогично управляемыми электродвигателями
приводит к стабилизации фиксированного направления, а трёх - к пространств.
стабилизации, используемой, в частности, в схемах инерциальной навигации.
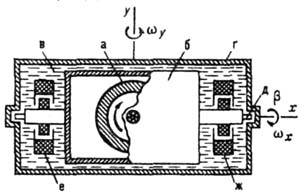
Рис. 15. Поплавковый
интегрирующий гироскоп: а - ротор гироскопа; б - поплавок, в теле
к-рого расположен подшипник оси ротора; в - поддерживающая жидкость;
г - корпус; д- стальные цапфы в камневых опорах; е - датчик
угла поворота поплавка относительно корпуса; ж - электромагнитное устройство,
прилагающее момент вокруг оси поплавка.
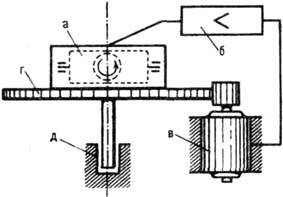
Рис. 16. Стабилизация вокруг
неподвижной оси посредством поплавкового гироскопа а - гироскоп-поплавок;
б - усилитель, в - электродвигатель; г - платформа, д
- основание.
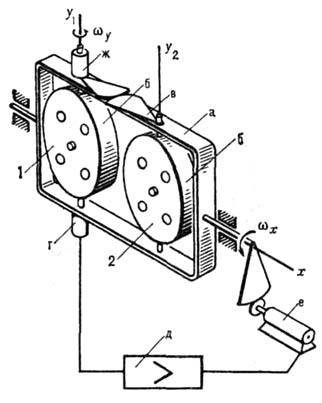
Рис. 17. Силовая гироскопическая рама: а - собственно рама; б - гироскоп; в - спарник; г - датчик угла поворота гироскопа относительно рамы; д - усилитель сигнала датчика; е - стабилизирующий двигатель; ж - датчик момента.
В рассмотренной системе
стабилизации Г. играет роль чувствит. элемента, обнаруживающего отклонения объекта
от заданного положения, а возвращение в это положение производится электродвигателем,
получающим соответствующий сигнал. Подобные системы гироскопич. стабилизации
наз. индикаторными (стабилизаторы непрямого действия). Наряду с этим в технике
применяются системы т. н. силовой гироскопич. стабилизации (стабилизаторы прямого
действия), в к-рых
Г. непосредственно воспринимают на себя усилия, мешающие осуществлению стабилизации,
а двигатели играют вспомогат. роль, разгружая частично или полностью Г. и ограничивая
тем самым углы их прецессии. Конструктивно такие системы проще индикаторных.
Примером может служить одноосная двухгироскопич. рама (рис. 17); роторы находящихся
в раме Г. вращаются в разные стороны. Допустим, что на раму подействует сила,
стремящаяся повернуть её вокруг оси х и сообщить угловую скорость  .
Тогда, по правилу Жуковского, на кожух 1 начнёт действовать пара, стремящаяся
совместить ось ротора с осью х. В результате Г. начнёт прецессировать
вокруг оси y2 с нек-рой угловой скоростью
.
Тогда, по правилу Жуковского, на кожух 1 начнёт действовать пара, стремящаяся
совместить ось ротора с осью х. В результате Г. начнёт прецессировать
вокруг оси y2 с нек-рой угловой скоростью  .
Кожух 2 по той же причине будет прецессировать вокруг оси y2
в противоположную сторону. Углы поворотов кожухов будут при этом одинаковы,
т. к. кожухи связаны зубчатым сцеплением. Вследствие этой прецессии на подшипники
кожуха 1 подействует новая пара, стремящаяся совместить
ось ротора с осью y1. Такая же пара будет действовать на подшипники
кожуха 2. Моменты этих пар направлены противоположно
.
Кожух 2 по той же причине будет прецессировать вокруг оси y2
в противоположную сторону. Углы поворотов кожухов будут при этом одинаковы,
т. к. кожухи связаны зубчатым сцеплением. Вследствие этой прецессии на подшипники
кожуха 1 подействует новая пара, стремящаяся совместить
ось ротора с осью y1. Такая же пара будет действовать на подшипники
кожуха 2. Моменты этих пар направлены противоположно  (что следует из правила Жуковского) и стабилизируют раму, т. е. удерживают её
от поворота вокруг оси х. Однако если прецессии Г. не будут ограничены,
то, как видно из ф-лы (3), при повороте кожухов вокруг осей y1,
у2 на угол 90° стабилизация прекратится. Поэтому на оси
одного из кожухов имеется датчик, регистрирующий угол поворота кожуха относительно
рамы и управляющий двигателем стабилизации. Возникающий у двигателя вращающий
момент направлен противоположно моменту, стремящемуся повернуть раму вокруг
оси х; вследствие этого прецессия Г. прекращается. Рассмотренная рама
стабилизирована по отношению к поворотам вокруг оси х. Повернуть раму
вокруг любой оси, перпендикулярной х, можно беспрепятственно, но возникающий
при этом гироскопич. момент может вызвать значит. давления на подшипники Г.
и их кожухов. Сочетание трёх таких рам с взаимно перпендикулярными осями приводит
к пространств. стабилизации (напр., искусств. спутника).
(что следует из правила Жуковского) и стабилизируют раму, т. е. удерживают её
от поворота вокруг оси х. Однако если прецессии Г. не будут ограничены,
то, как видно из ф-лы (3), при повороте кожухов вокруг осей y1,
у2 на угол 90° стабилизация прекратится. Поэтому на оси
одного из кожухов имеется датчик, регистрирующий угол поворота кожуха относительно
рамы и управляющий двигателем стабилизации. Возникающий у двигателя вращающий
момент направлен противоположно моменту, стремящемуся повернуть раму вокруг
оси х; вследствие этого прецессия Г. прекращается. Рассмотренная рама
стабилизирована по отношению к поворотам вокруг оси х. Повернуть раму
вокруг любой оси, перпендикулярной х, можно беспрепятственно, но возникающий
при этом гироскопич. момент может вызвать значит. давления на подшипники Г.
и их кожухов. Сочетание трёх таких рам с взаимно перпендикулярными осями приводит
к пространств. стабилизации (напр., искусств. спутника).
В силовых гироскопич. системах,
в отличие от свободных Г., из-за больших моментов инерции стабилизируемых масс
возникают весьма заметные колебат. движения типа нутаций. Должны быть приняты
спец. меры для того, чтобы эти колебания были затухающими, иначе в системе возникают
автоколебания. В технике применяются и др. гироскопич. приборы, принципы действия
к-рых основаны на свойствах Г.

А. Ю. Ишлинский
Дело в том, что в его постановке и выводах произведена подмена, аналогичная подмене в школьной шуточной задачке на сообразительность, в которой спрашивается:
- Cколько яблок на березе, если на одной ветке их 5, на другой ветке - 10 и так далее
При этом внимание учеников намеренно отвлекается от того основополагающего факта, что на березе яблоки не растут, в принципе.
В эксперименте Майкельсона ставится вопрос о движении эфира относительно покоящегося в лабораторной системе интерферометра. Однако, если мы ищем эфир, как базовую материю, из которой состоит всё вещество интерферометра, лаборатории, да и Земли в целом, то, естественно, эфир тоже будет неподвижен, так как земное вещество есть всего навсего определенным образом структурированный эфир, и никак не может двигаться относительно самого себя.
Удивительно, что этот цирковой трюк овладел на 120 лет умами физиков на полном серьезе, хотя его прототипы есть в сказках-небылицах всех народов всех времен, включая барона Мюнхаузена, вытащившего себя за волосы из болота, и призванных показать детям возможные жульничества и тем защитить их во взрослой жизни. Подробнее читайте в FAQ по эфирной физике.
|
|
